組立要領はマガジンの組み立てガイドに詳しく書かれていますので、ここでは省略し、組み立てガイドに従って組み付けた後の状態の写真を掲載しておきます。

第41号 (2014/12/23号) 動作テストの準備と充電をする・・・バッテリー不良

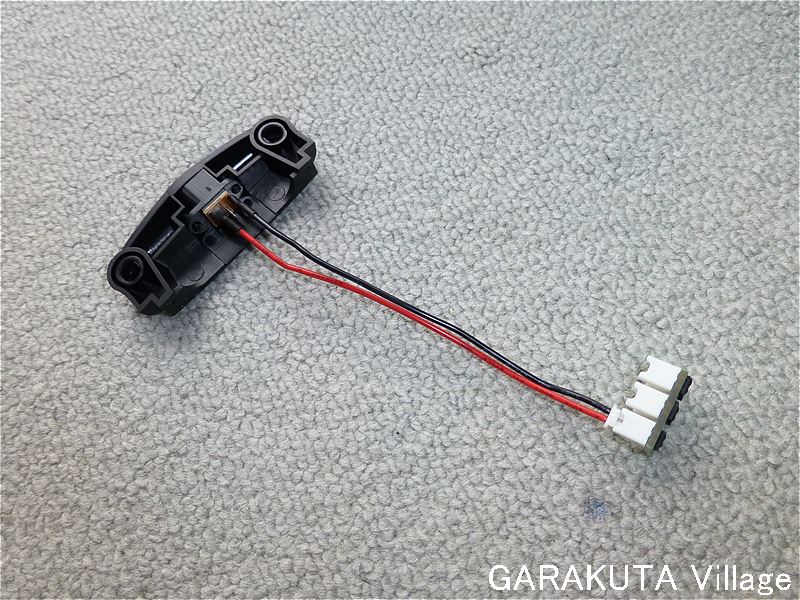
充電ジャックケーブルをヒップカバーに取り付ける

分電盤に保護シールを貼る
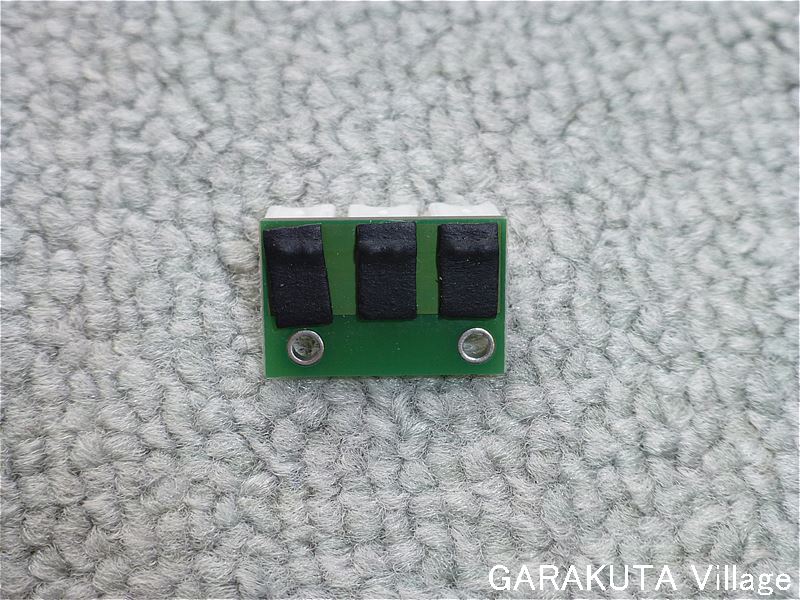
分電盤にケーブルを接続する

充電する
充電で異常と思われる事態が発生第41号の12ページの通りに接続。 12月11日15時24分に充電器をACコンセントへ差し込み。 13ページには「初回の充電は20分前後で、使い切った状態からは1時間ほどで終わるだろう」と書かれているので、20分過ぎから30分過ぎまで充電器を見ていたが、 「赤ランプ」点灯のままで、 「緑ランプ」には変わらない。 その後、そのまま充電を続行。 下の写真は、3時間が経過した18時30分の充電器のランプの点灯状態。 これ以上、充電を続けることは怖いので、充電を中断して、ケーブルの接続を外した。 |



2014/12/12の早朝、 デアゴスティーニ(DeAGOSTINI)のサイトを利用して問合せ問合せ内容は下記の通り。 ———- 週刊「ロビ」再刊行版を組み立てています。 15ページには「初回の充電は20分前後で、使い切った状態からは1時間ほどで終わるだろう」と書かれています。 しかし、充電を開始してから30分経過しても充電器は「赤ランプ」点灯のまま。 そのまま充電を続行。 気持ち悪いので、充電器が「緑ランプ」にならないまま、3時間で充電を中止しました。 この状態で、バッテリー、充電器には異常はありませんか? |
2014/12/12の昼前に デアゴスティーニ(DeAGOSTINI)からメールで連絡あり
|

2014/12/16の夕方、バッテリーが到着2014/12/16の夕方、バッテリーが到着。 2014/12/17、バッテリーの充電。 バッテリーと充電器を接続。 8時14分に充電器をACコンセントに差して充電開始。 充電開始から15分後の8時29分に見たら、 「緑ランプ」が点灯していて、充電完了。 |





ケーブルを取り外す

第41号は、Robi本体の組立はありません
第42号 (2014/12/30号) テスト用microSDカードを確認する

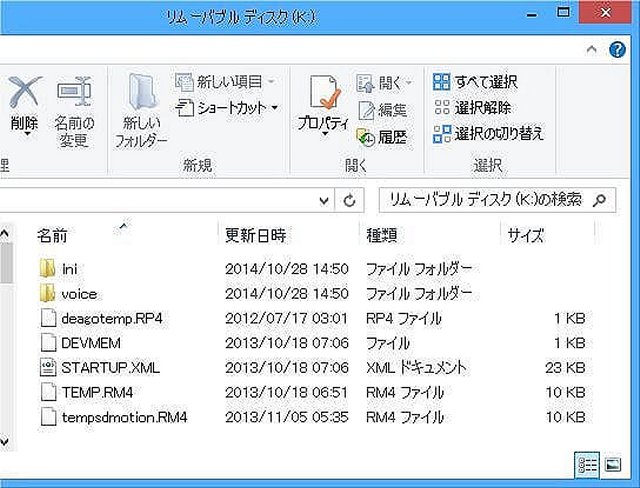
テスト用microSDカードを確認する
パソコンで確認。
第42号は、Robi本体の組立はありません
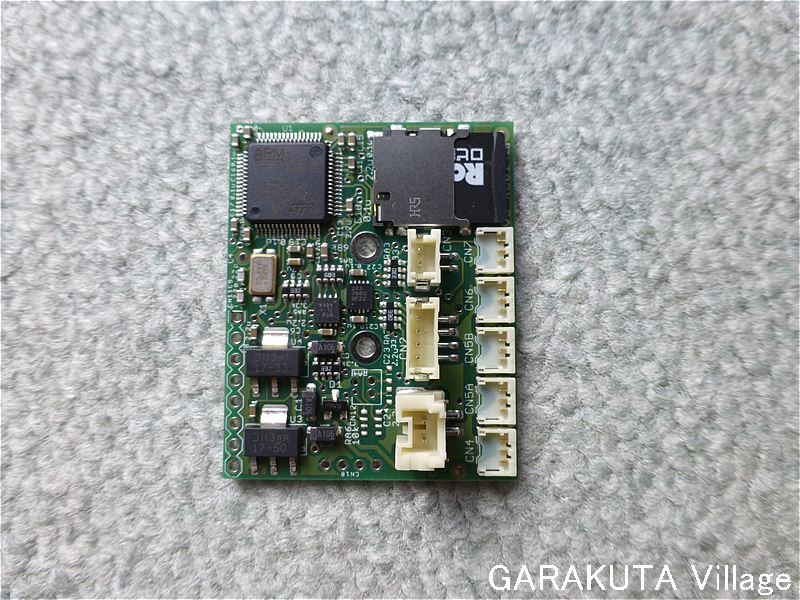
第43号 (2015/01/13号) マイコンボードを使って右腕の動作テストをする
右腕のID17のサーボモータ不良、右腕の肩フレームとサーボモータが干渉


右ボディにマイコンボードを取り付ける
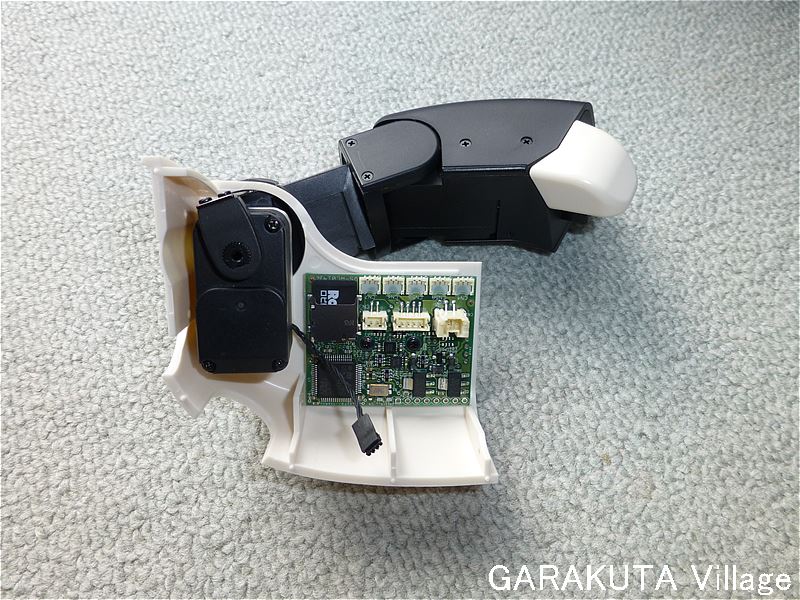

右腕の動作テストをする
動作テストで、ID17のモーターに異常
|
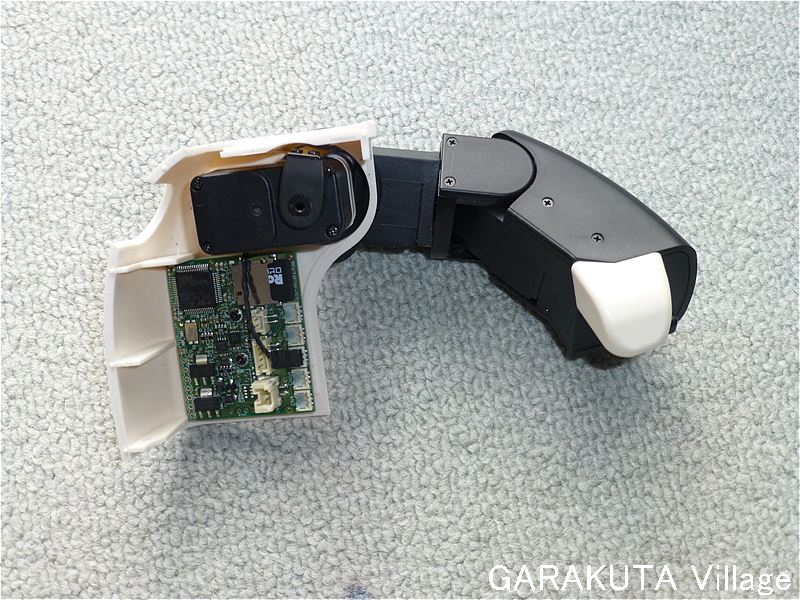
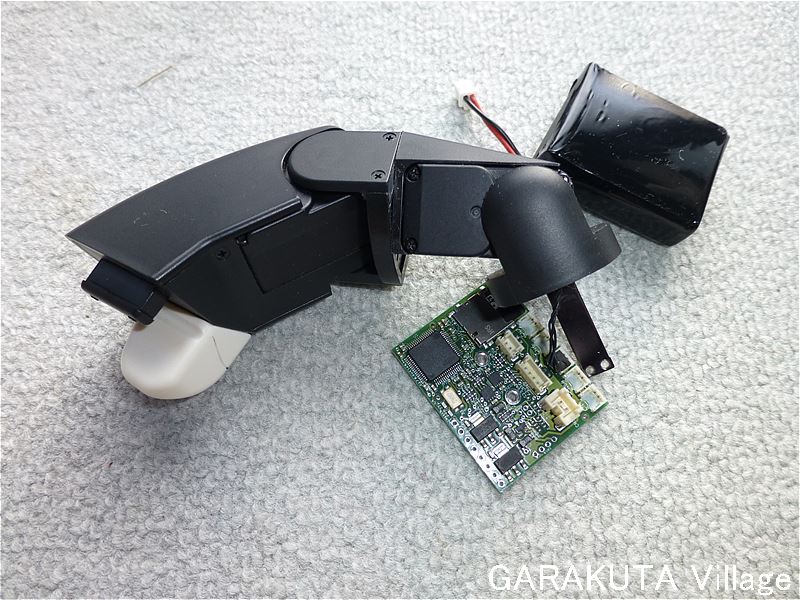
2015/01/06、DeAGOSTINI デアゴスティーニ・ジャパンから回答あり右腕を分解して、ID16とID17とID18のサーボモータを数珠つなぎにして、マイコンボードに接続して動作確認を実施。 ①動作確認の結果、ID16とID18のサーボモータは動くが、ID17のサーボモータは全く動かない。 ②テストボードを使ってID17のモーター単体でIDを確認したら、「ID17」は書き込まれていた。 ③テストの要領は下の写真の通り。 回答には、 以上の①と②を書き、テスト時の写真を貼付して、DeAGOSTINI デアゴスティーニ・ジャパンへ1月7日に連絡。 |

2015/01/08、DeAGOSTINI デアゴスティーニ・ジャパンから回答あり
|
「ID17」のモーターの代わりに、第44号付属のサーボモータを使用1月8日に第44号を書店に取りに行った。 第44号に付いていたサーボモータを、「ID17」のモーターの代わりに使うことにして、ID16とID17のとID18のサーボモータを数珠つなぎにして、マイコンボードに接続して動作確認を実施。 ①第44号に付いていたサーボモータの動作テスト・・・OK。
③ID16とID17のとID18のサーボモータを数珠つなぎにして、マイコンボードに接続して動作確認を実施。・・・「ID17」のモータが動く・・・OK。
④第11号の説明のように、「ID17」のモータを組み付けて、この状態でマイコンボードに接続し、ID17のとID18の2つのサーボモータの状態でテスト・・・OK。
⑤第12号の説明のように組み立てて、念のために動作確認・・・ID17のとID18の2つのサーボモータが動く・・・OK。
続いて、第14号のように、ID16のモータを組み付けたいのだが、右ボディカバーの代替品が到着するまで組立作業は中断。
1月9日に12号3番-肩フレーム×1と14号1番-右ボディカバーの代替品が到着したので、肩フレームを組替えてみた。
やはり肩フレームとモーターが干渉して動きがギクシャクするので、ヤスリで修正した肩フレームに戻した。・・・これで動きが格段にスムーズになった。しかし、何か引っ掛かっているような動きをするが、引っ掛かっている部分が摩耗して馴染むまで気長に待つことにする。 続いてID16のサーボモータを仮に繋いだ状態で動作テスト。・・・OK。
右ボディカバーの代替品とID16のサーボモータを組み付けて動作テスト。
ID16とID17とID18のサーボモータが繰り返して動き、動作OK。 |







週刊ロビ(Robi)再刊行版 右腕の動作テスト(2015/01/08)
第43号 完了
