
組立要領はマガジンの組み立てガイドに詳しく書かれていますので、ここでは省略し、組み立て中に気づいたこと・他を書いておきます。
なお、組み立てガイドに従って組み立てますので、組み付けた状態の写真を掲載しておきます。

第56号 (2012/03/27号) 左脚の股関節フレームを取り付ける


左股関節にフレームを取り付ける
56-1 サーボホーンの位置を調整する

56-2 股関節フレームをはめる
56-3 股関節フレームの位置を調整する
56-4 ネジで固定する
56-5 フリーホーンの位置を調整する

56-6 ネジで固定する
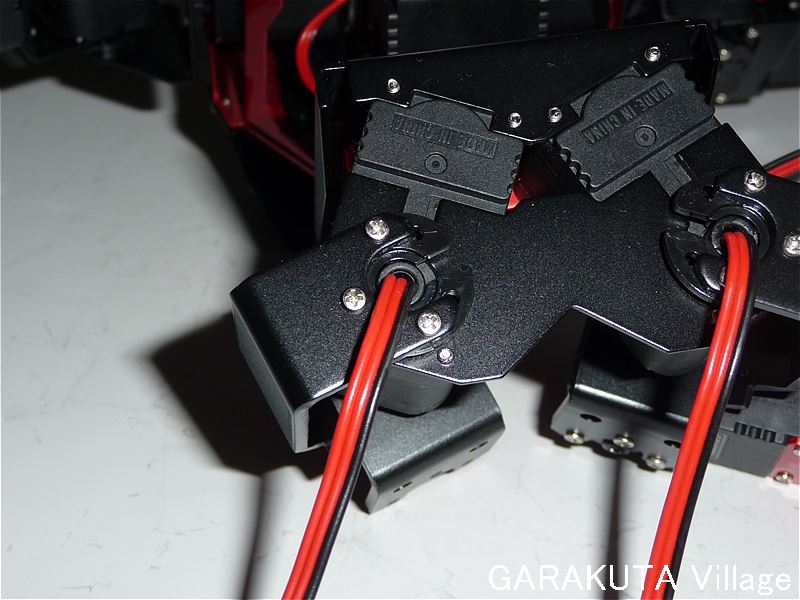
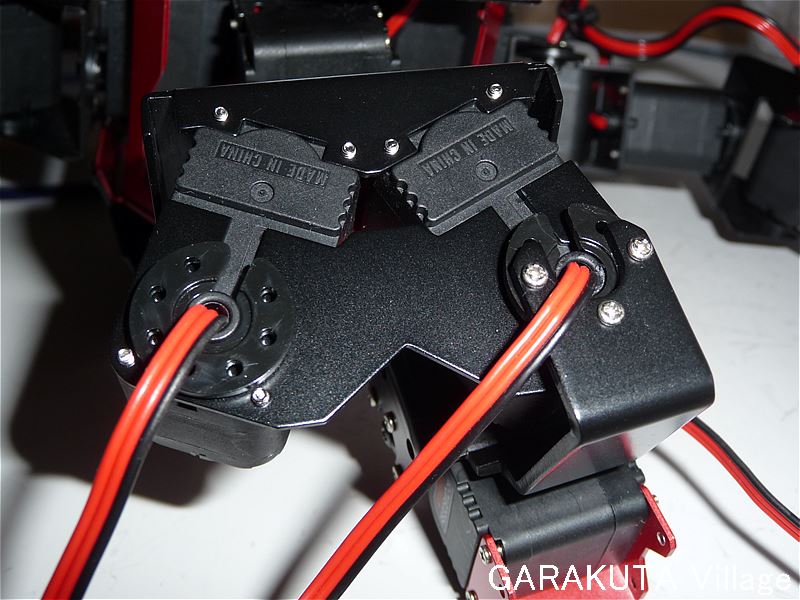
第56号の組立完了状態
第57号 (2012/04/03号) 右脚を完成させる


サーボモーターを組み立てる
57-1 サーボホーンを正しい位置に取り付ける
57-2 ネジを締めて固定する
写真は省略
サーボモーターの動作テストを行う
57-3 バッテリーボックスとテストボードをつなぐ
57-4 テストボードとサーボモーターをつなぐ
57-5 電源を入れ、動きを確認する
写真は省略
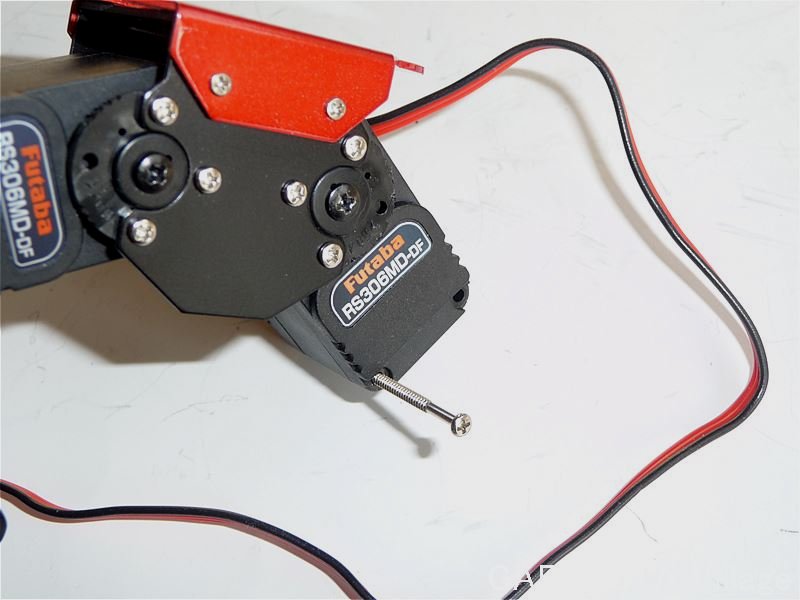
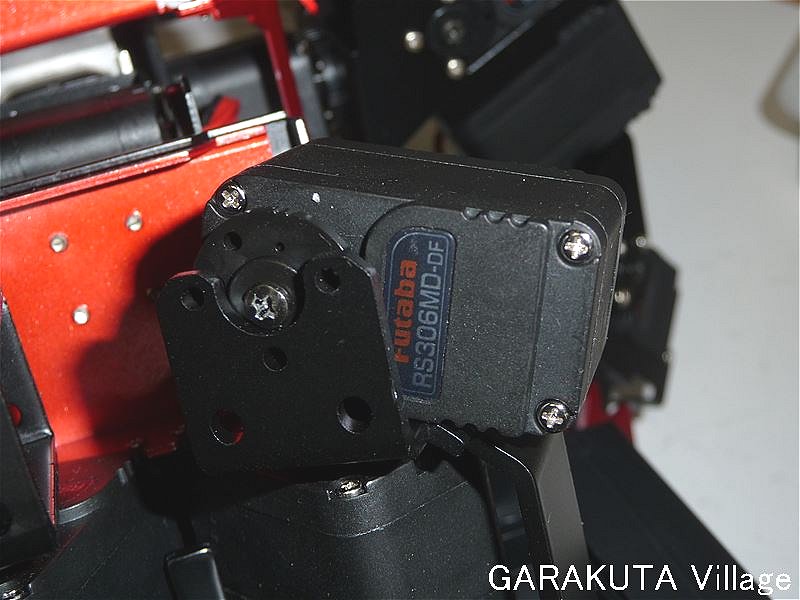
動作テストを実施した結果、サーボモータから異常音が発生
動作音を文字で表すのは非常に難しいのですが、時計方向へ回転する時は「キューン」といったような軽やかな音で、他のサーボモーターと変わりなし。
しかし、反時計方向へ回転する時は「カリカリ」といったような異常音が混じっています。
多分サーボモーターの不具合だろうと思うので、サーボモーターRS306MD-DFは手持ちの予備品を使用して第57号の組立を続けました。
不具合と思われるサーボモーターを交換してもらおうと思うのですが、書店経由の定期購読ですから、交換手続きはどのようにすればよいのかが判らないので、3月22日の午後、デアゴスティーニ(DeAGOSTINI)のサイトから問い合わせをしました。
問い合わせから2時間も経たないうちにデアゴスティーニ(DeAGOSTINI)から電話があり、サーボモーターRS306MD-DFを送ってもらえるとのことでした。
3月23日の午後、デアゴスティーニ(DeAGOSTINI)からサーボモーターRS306MD-DFが到着しました。
直ちに動作テストを実施。時計方向、反時計方向ともに軽やかな音がしています。
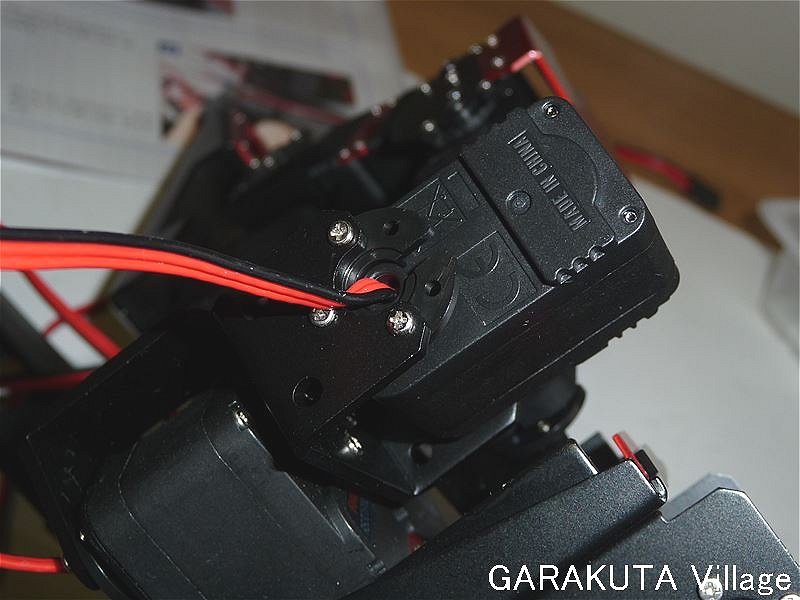
右脚の太ももを完成させる
ここからは、予備品のサーボモーターRS306MD-DFを使用して作業
57-6 サーボホーンの位置を調整する

57-7 右膝のフレームにサーボモーターをはめる


57-8 位置を調整する

57-9 ネジで固定する

57-10 フリーホーンを調整する

57-11 ネジで固定する
股関節に連結する
57-12 サーボモーターのネジを抜く

57-13 股関節につなげる

57-14 ネジで固定する

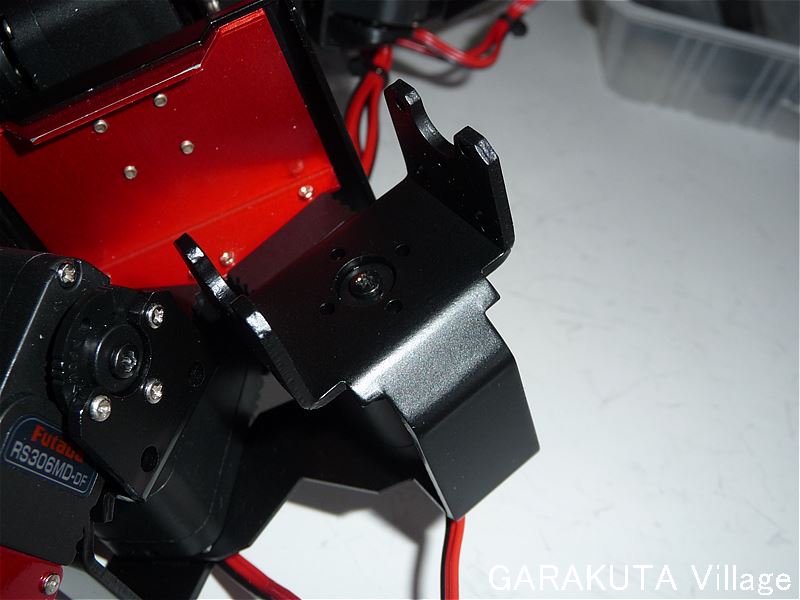
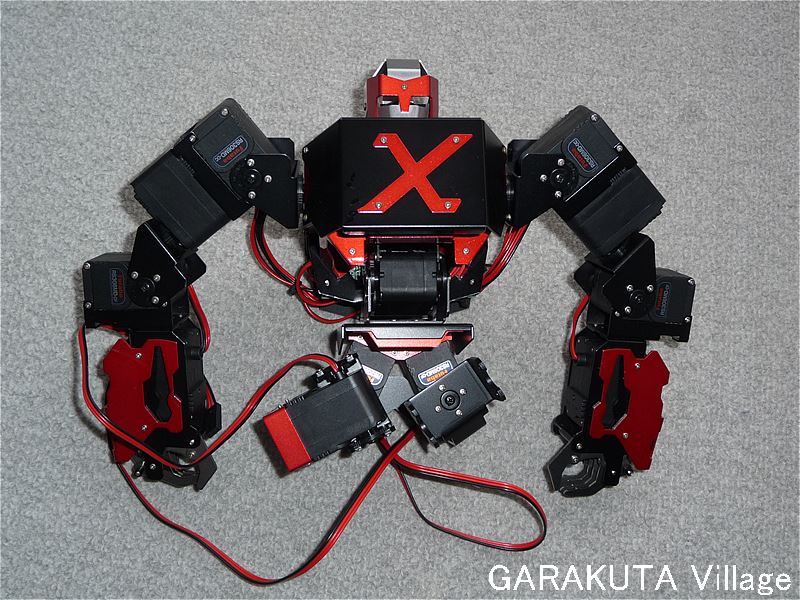
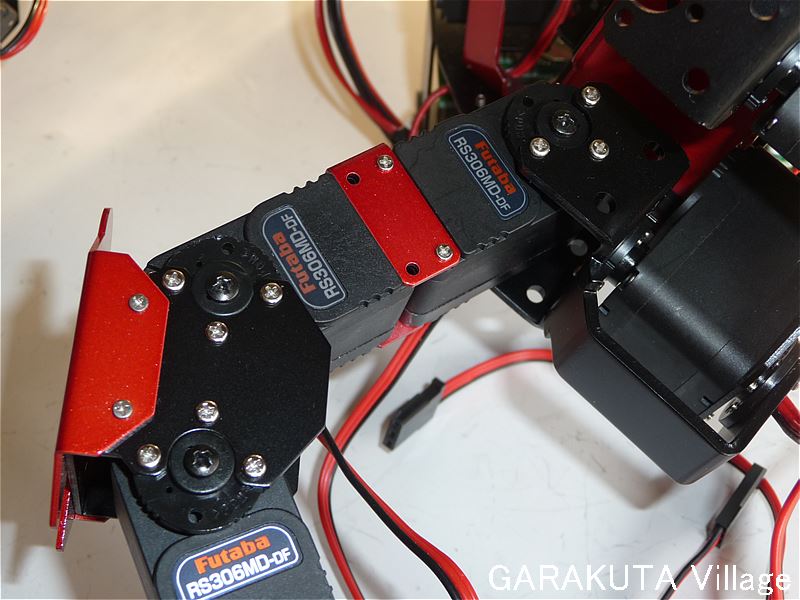
第57号の組立完了状態
第58号 (2012/04/10号) うんていフレームとうんていバーを組み立てる


右のセットを組み立てる
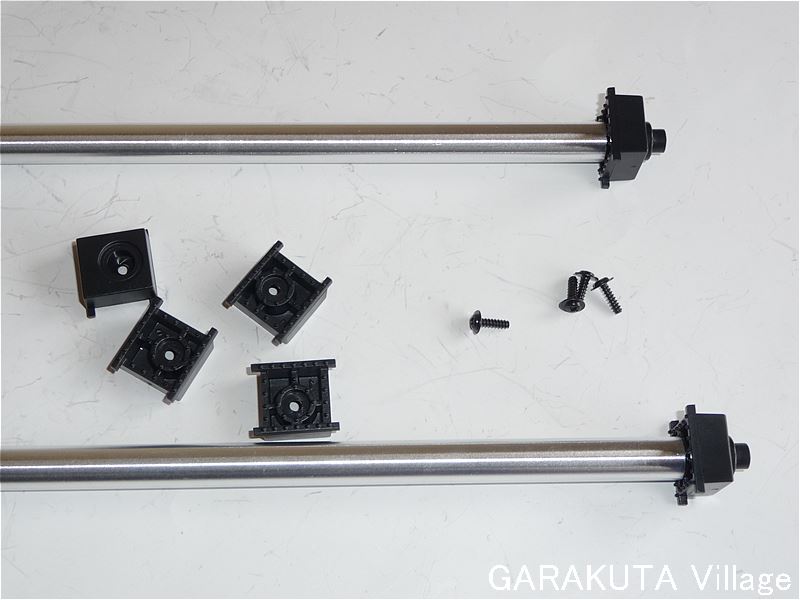
58-1 うんていポスト(右)とうんていフレーム(右)を用意する

58-2 ポストとフレームの位置関係を確認する

58-3 ネジで固定する

左のセットを組み立てる
58-4 ポスト(左)とフレーム(左)を用意する

58-5 ポストとフレームの位置関係を確認する

58-6 ネジで固定する

うんていバーを組み立てる
組み立てガイドでは1本ずつ組み立てていますが、ここでは、2本を同時に組み立て。

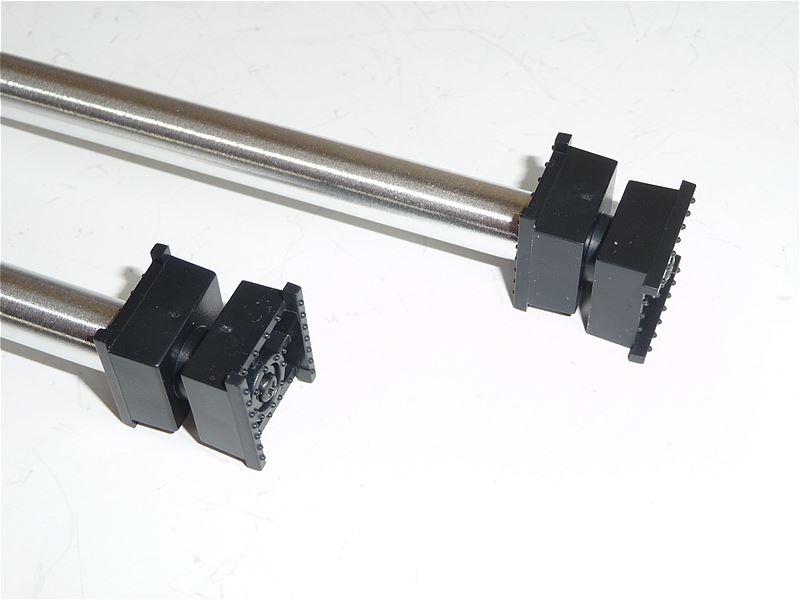
58-7 うんてい内側ホルダーを取り付ける
58-8 うんてい外側ホルダーを取り付ける
第59号 (2012/04/17号) 左股関節にサーボモーターを取り付ける


サーボモーターを組み立てる
59-1 サーボホーンを正しい位置に取り付ける
59-2 ネジを締めて固定する
写真は省略
サーボモーターの動作テストを行う
59-3 バッテリーボックスとテストボードをつなぐ
59-4 テストボードとサーボモーターをつなぐ
59-5 電源を入れ、動きを確認する
写真は省略
右の股関節にサーボモーターを取り付ける
59-6 サーボホーンの位置を調整する・・・写真は省略
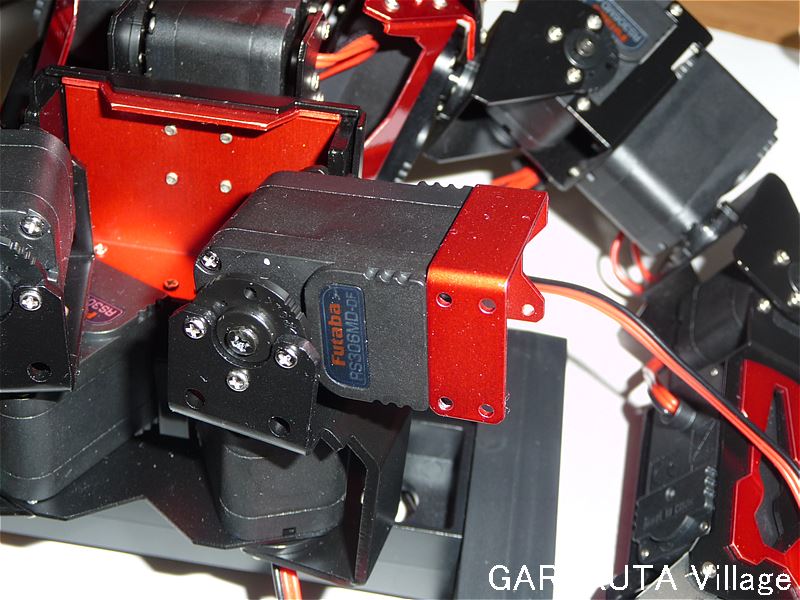
59-7 股関節フレームにサーボモータをはめる
59-8 位置を調整する
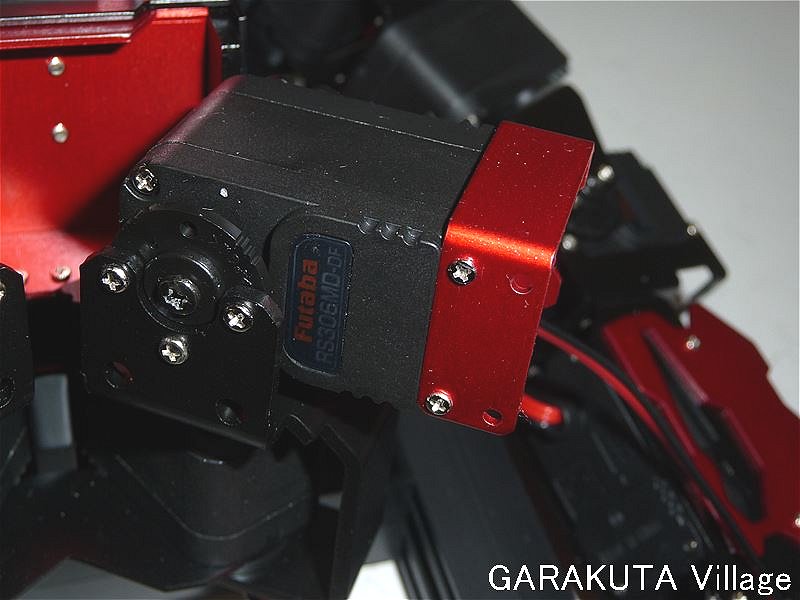
59-9 ネジで固定する

59-10 フリーホーンを調整する
59-11 ネジで固定する
サーボ連結フレームを取り付ける
59-12 サーボモーターのネジを抜く

59-13 サーボ連結フレームを取り付ける
59-14 ネジで固定する
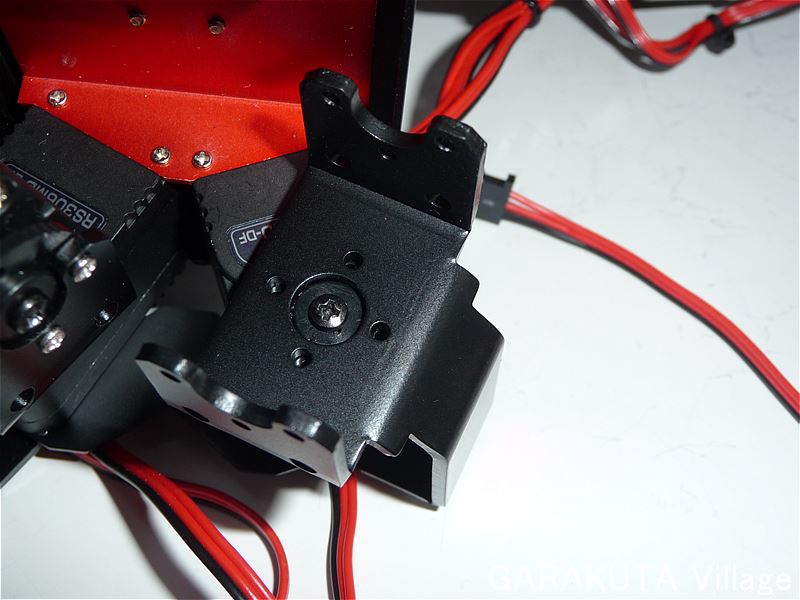
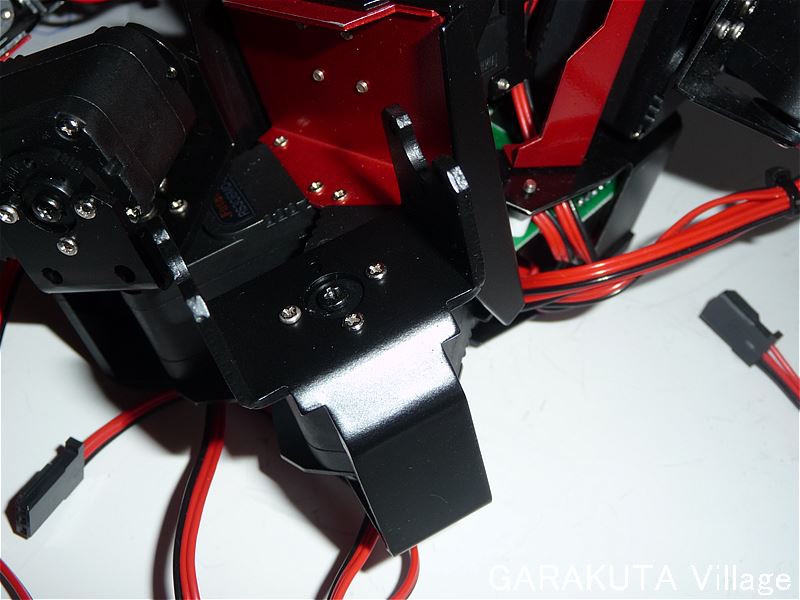
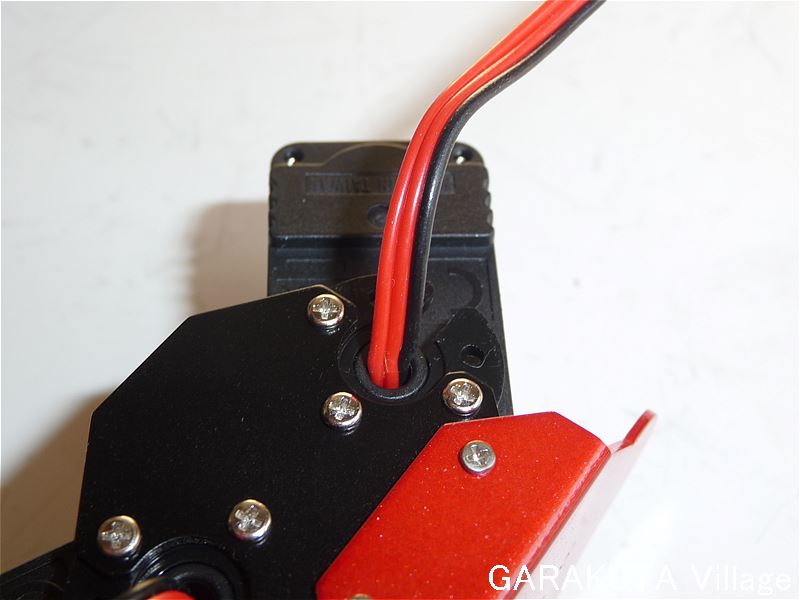
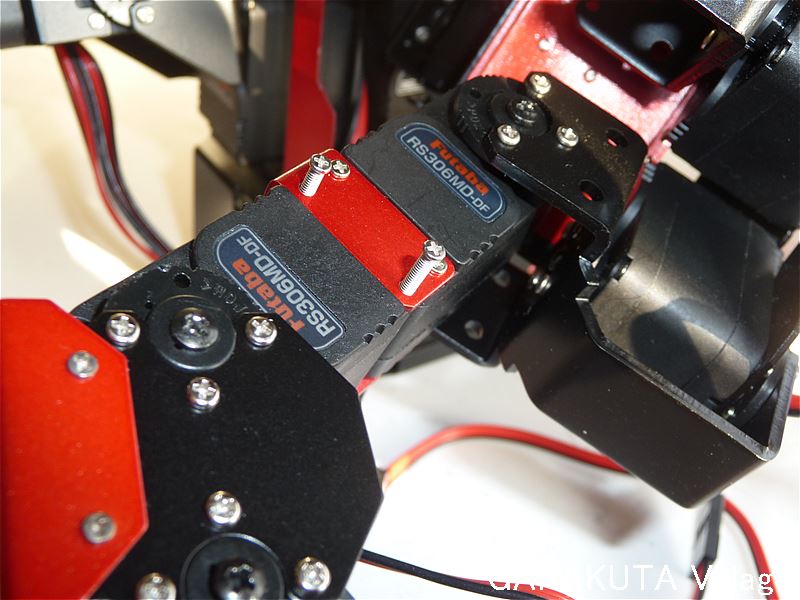
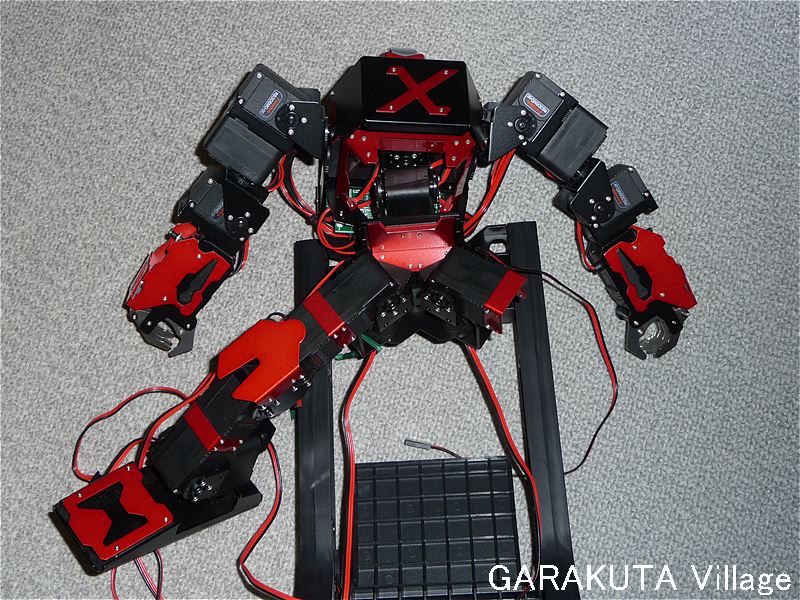
第59号の組立完了状態
第60号 (2012/04/24号) ROBO XERO 専用の充電器


今号は、メカの組み立てはありません。
ROBO XERO専用の充電器
充電器はバッテリーの前の号でもよいのですが・・・
その前に、左脚を完成したいものです。が、そうは問屋が卸さないことでしょうね。
お知らせ