
組立要領はマガジンの組み立てガイドに詳しく書かれていますので、ここでは省略し、組み立て中に気づいたこと・他を書いておきます。なお、組み立てガイドに従って組み立てますので、組み付けた状態の写真を掲載しておきます。

第16号 (2011/06/14号) 左膝を組み立てる


膝のパーツを組み立てる
第13号 (2011/05/24号) の作業と同じ。
16-1 2種類のフレームを正しく組み合わせる

16-2 ネジで固定する
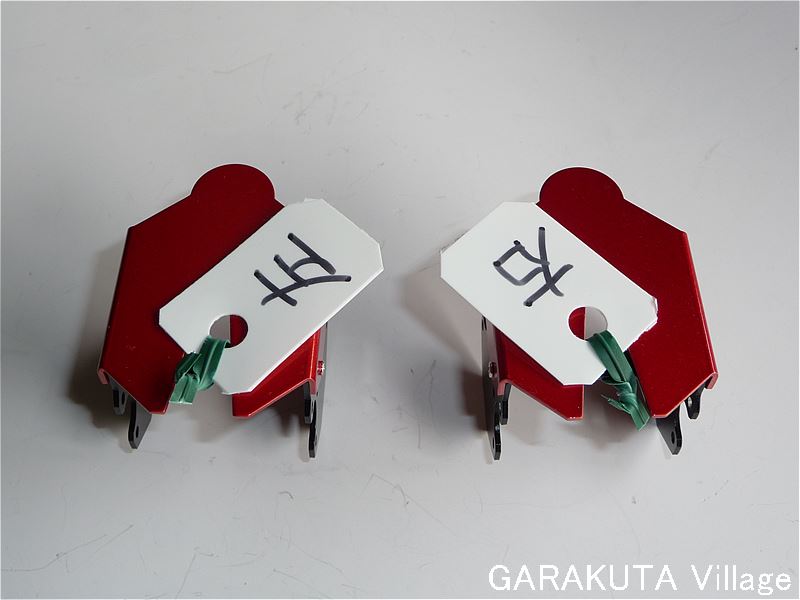
第13号の右膝と、第16号の左膝です。
第17号 (2011/06/21号) 左足を組み立てる



左足のパーツを組み立てる
第14号 (2011/05/31号) の作業と同じため組立中の写真は省略。
17-1 2つのパーツの位置を確かめる
17-2 ネジで固定する

第17号までの組立状態
予備のサーボモーター2個も写っています。

第18号 (2011/06/28号) 左上腕部のサーボのテストをする


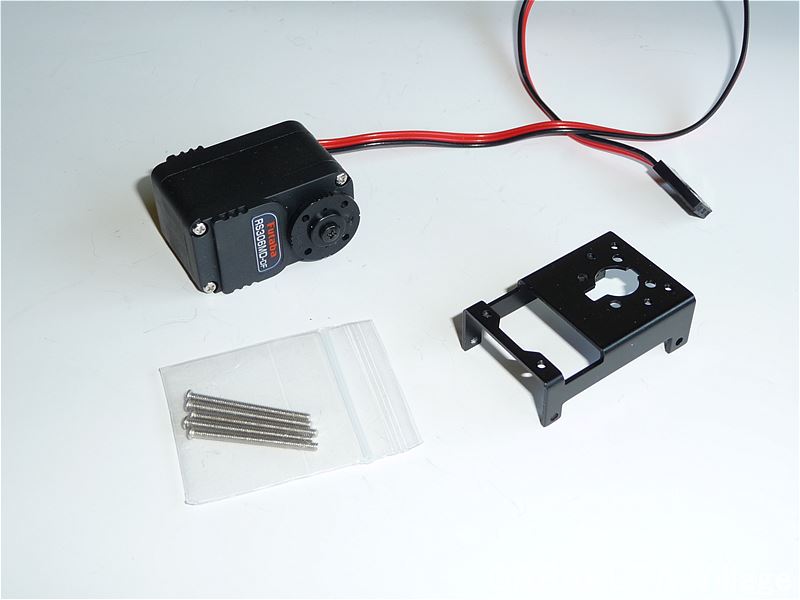
サーボモーターを組み立てる
第09号 (2011/04/26号) の作業と同じため写真は一部省略。
18-1 サーボホーンを正しい位置に取り付ける
18-2 ネジを締めて固定する

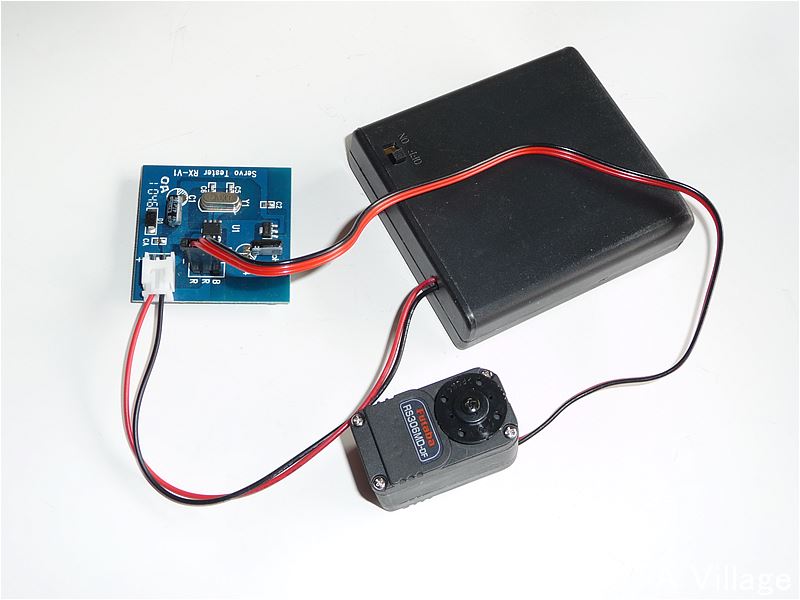
サーボモーターの動作テストを行う
第06号 (2011/04/05号) の作業と同じため写真は一部省略。
18-3 バッテリーボックスとテストボードをつなぐ
18-4 ステトボードとサーボモーターをつなぐ
18-5 電源を入れ、動きを確認する
第19号 (2011/07/05号) 左上腕部とスタンドフォークを組み立てる


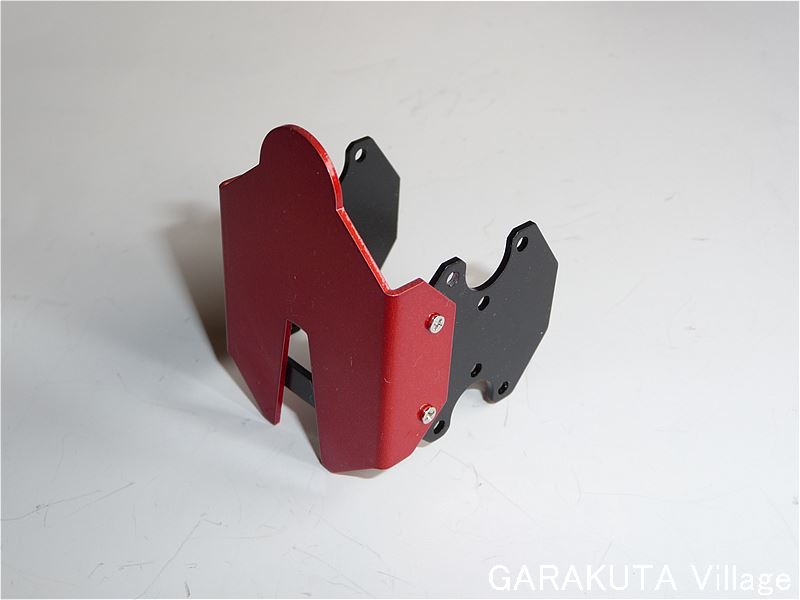
サーボブラケットを取り付ける
これまでの作業と同じような作業のため、写真は一部省略。
19-1 ケーブルを正しく通す
19-2 サーボブラケットをサーボモーターに正しくセットする
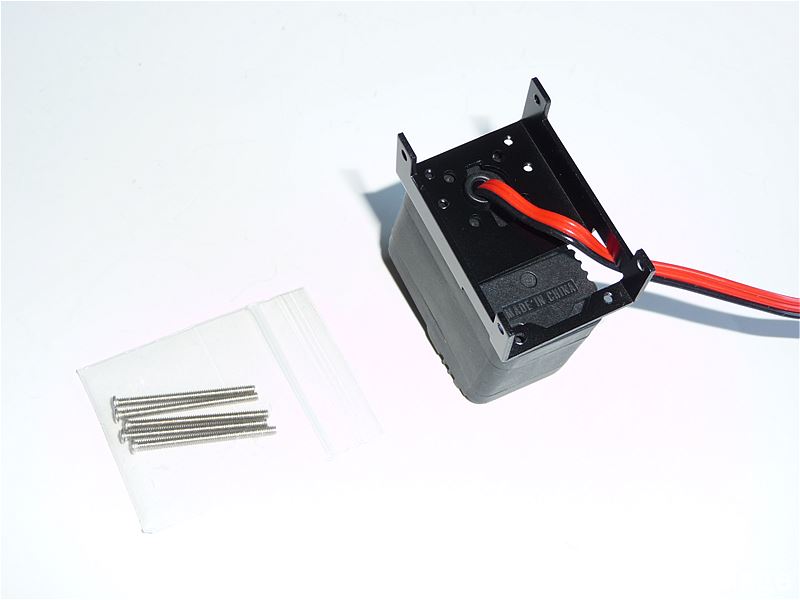
19-3 サーボモーターの下の2本のネジを抜き取る
19-4 長いネジを差し込み締める
19-5 サーボモーターの上の2本のネジを抜き取る
19-6 長いネジを差し込み締める

コの字ブラケットの穴を修正する
前ページの第15号で、「穴付きコの字ブラケットに少々問題あり」と書きましたが、コの字ブラケットを使用することになりましたので、穴を修正しました。
使用した工具は「テーパーリーマー」。
このテーパーリーマーは、大昔にアマチュア無線をやっていた頃、無線機器の自作の時に使っていたもので、40年以上前のものです。

穴が大きくなり過ぎないように、バリを取り除くような気持ちで軽く修正しました。

穴付きコの字ブラケットをサーボモーターに取り付ける
これまでの作業と同じような作業のため、写真は一部省略。
19-7 コの字ブラケットを、正しい位置に取り付ける
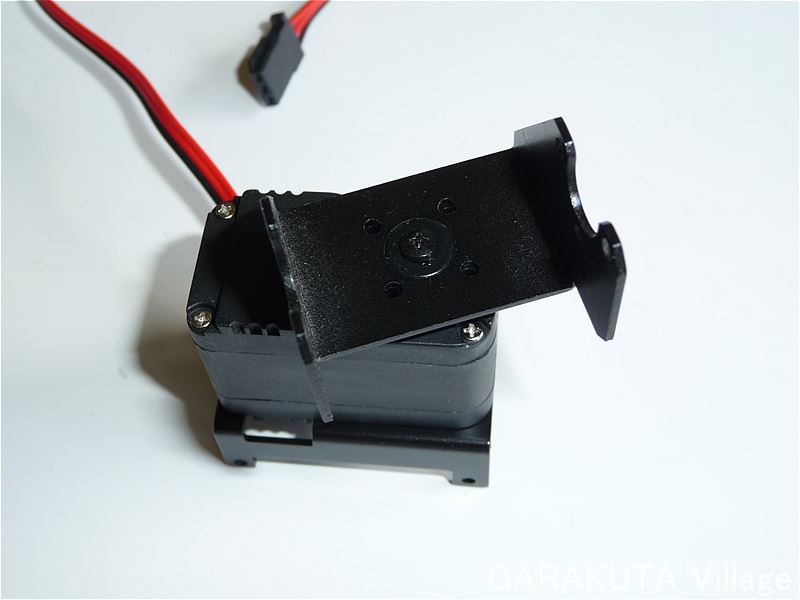
19-8 ネジで固定する
19-9 ニュートラルの位置にする

ロボットスタンドのパーツを作る
19-10 パーツを確認する

19-11 ネジで固定する

動作テスト中
DeAGOSTINIの週刊ロボゼロ(ROBO XERO) サーボーモーターの動作テスト(7)
第19号の組立完了状態

第20号 (2011/07/12号) 組立はありません


組立はありません
スタンドは、もっと後の号でも良いような気がしますが・・・
デアゴスティーニ(DeAGOSTINI) の商売上の策略でしょうね。
お知らせ