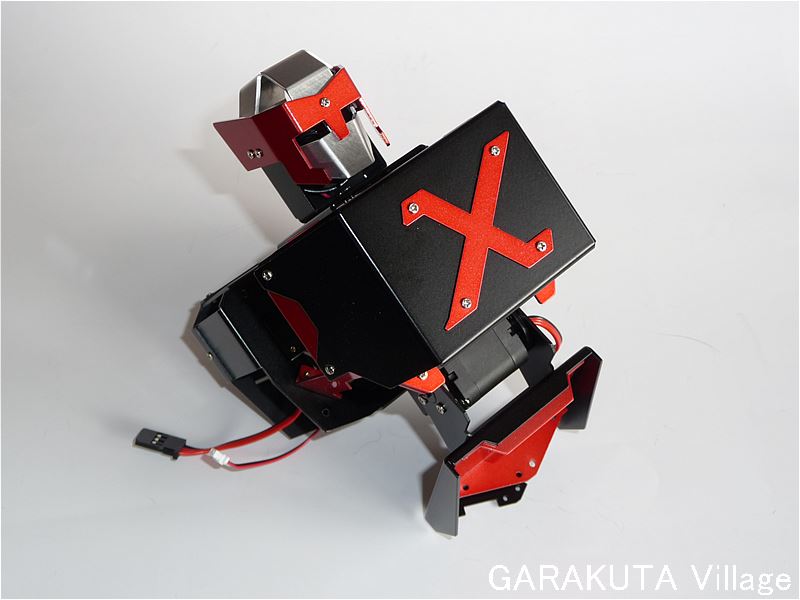
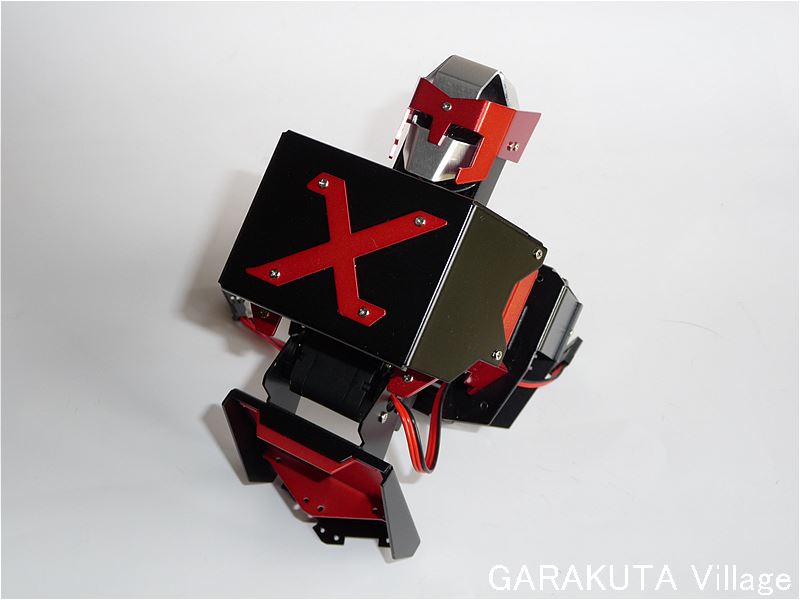
組立要領はマガジンの組み立てガイドに詳しく書かれていますので、ここでは省略し、組み立て中に気づいたこと・他を書いておきます。なお、組み立てガイドに従って組み立てますので、組み付けた状態の写真を掲載しておきます。

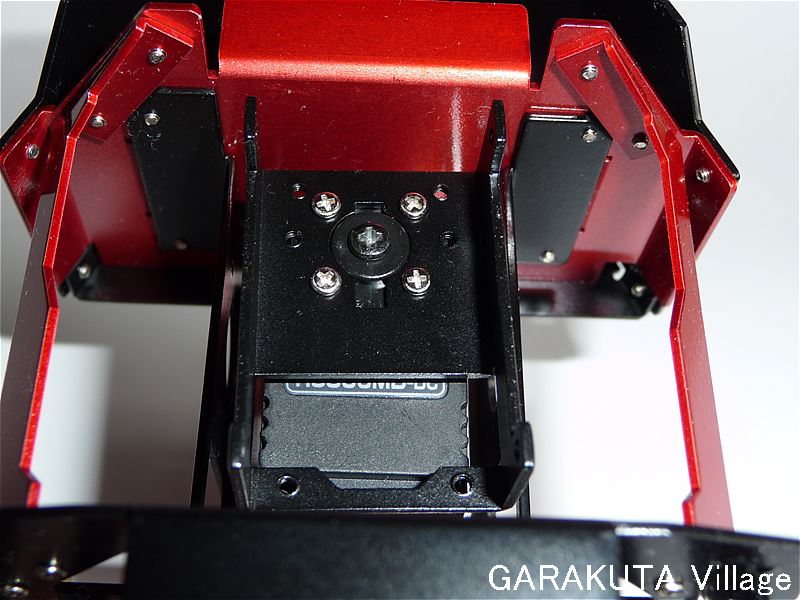
第11号 (2011/05/10号) 胴体内部のサーボにサーボブラケットを取り付ける


サーボブラケットを正しい位置で取り付ける
11-1 サーボホーンをニュートラルの位置にする

11-2 サーボブラケットを正しい位置に取り付ける
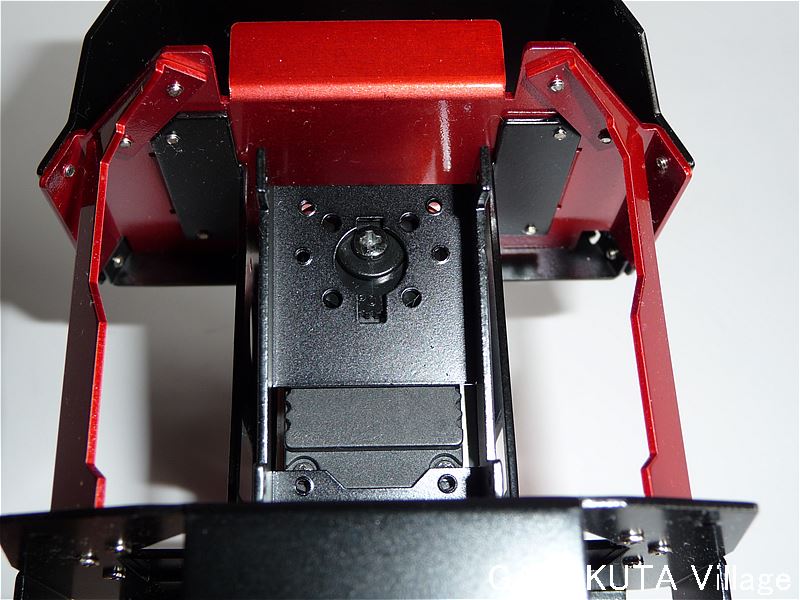
11-3 ネジで固定する
【注意】この後で、サーボモーターをテストボードに接続して、電動での動きを確認したいところですが、下記のような不具合があるかも知れませんので、先ず、手動で確認してみて下さい。
[続] 第11号 異常!!! これで良いのだろうか? パーツの精度不良か?
第11号の組立は4月28日に簡単に終わりました。
組立が終わったところで、取り付けたサーボブラケットの動きを確認。もちろん手動です。
動く範囲が変です。
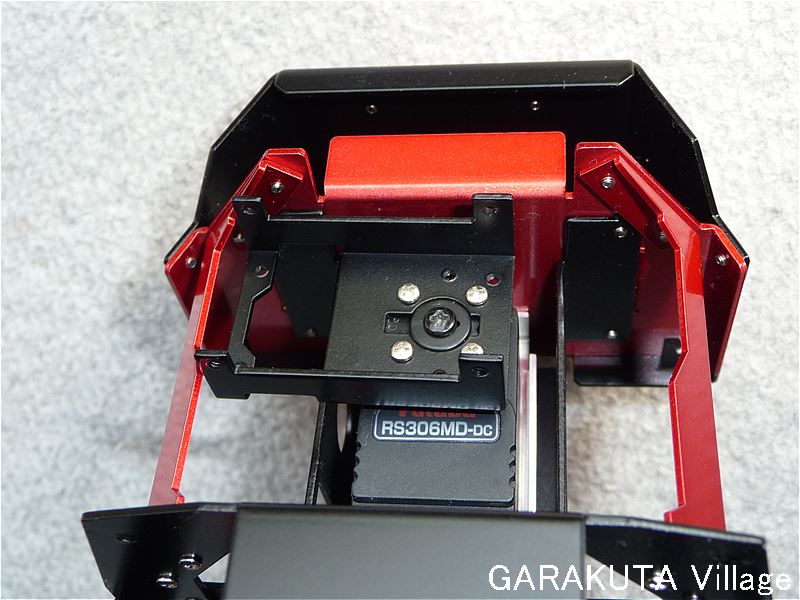
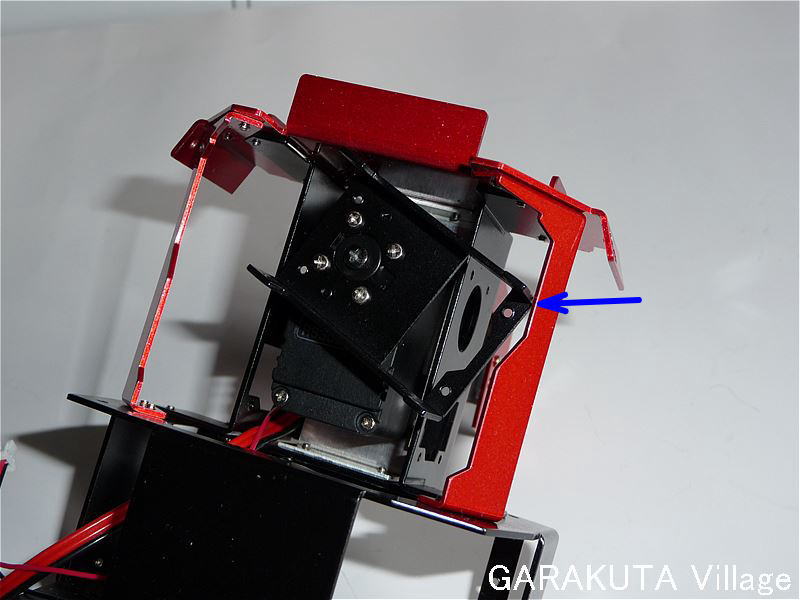
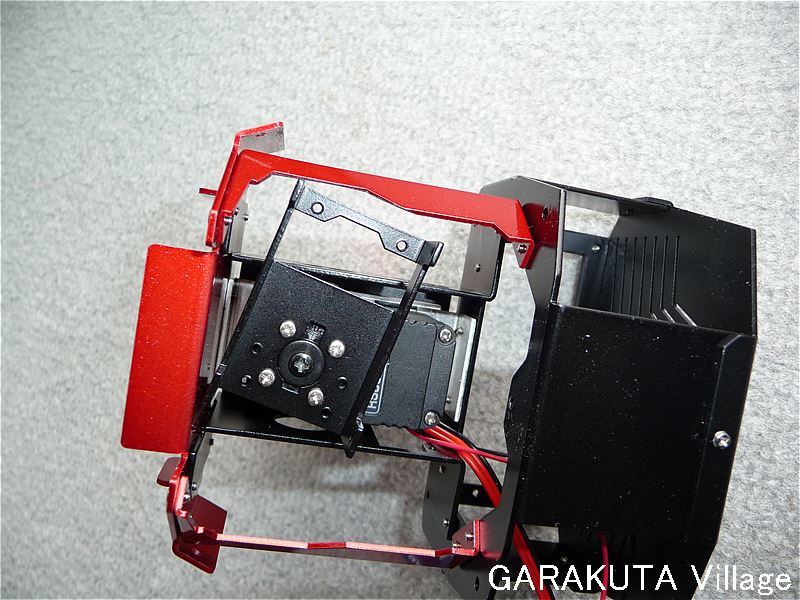
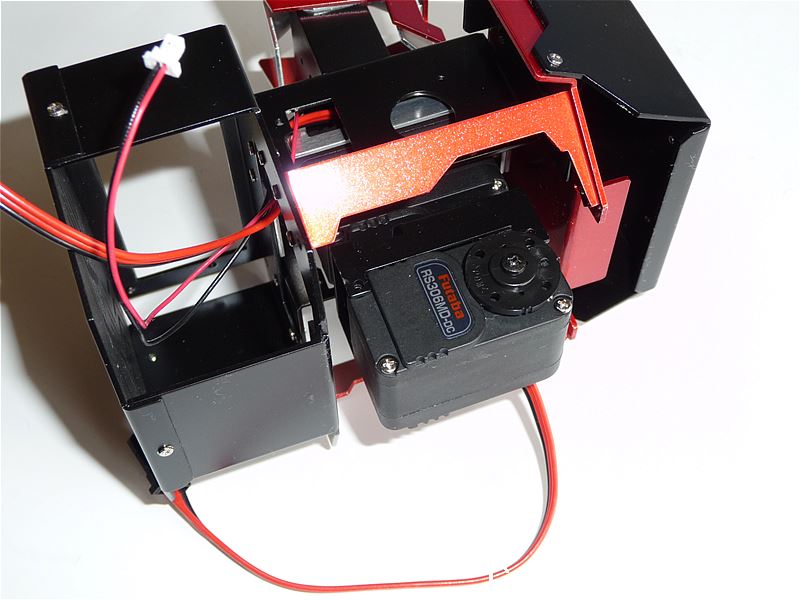
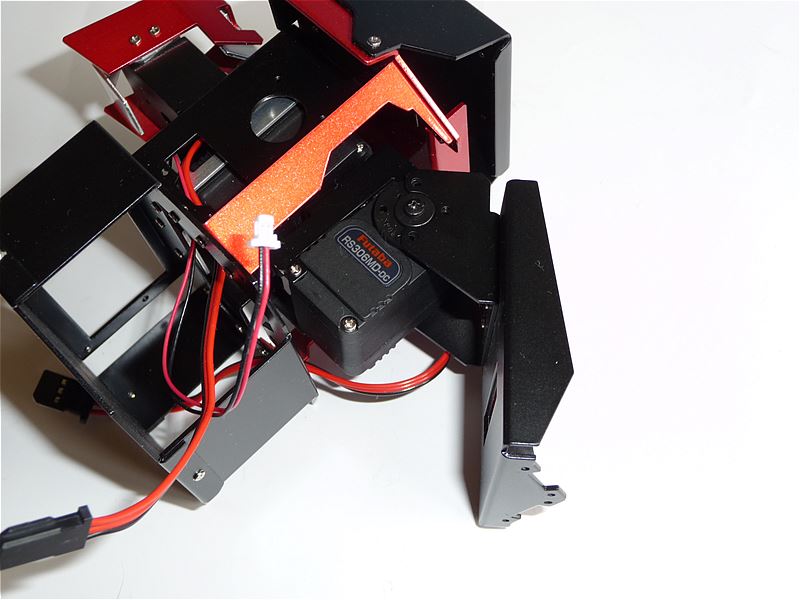
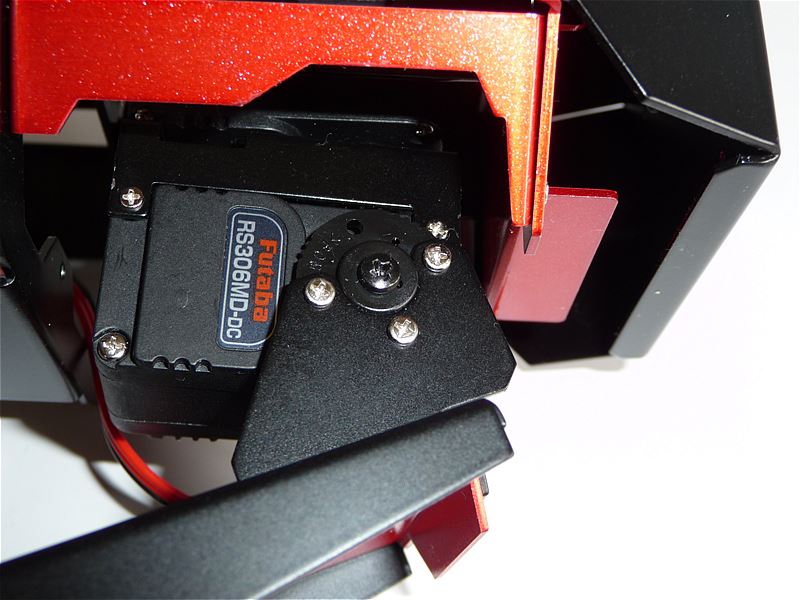
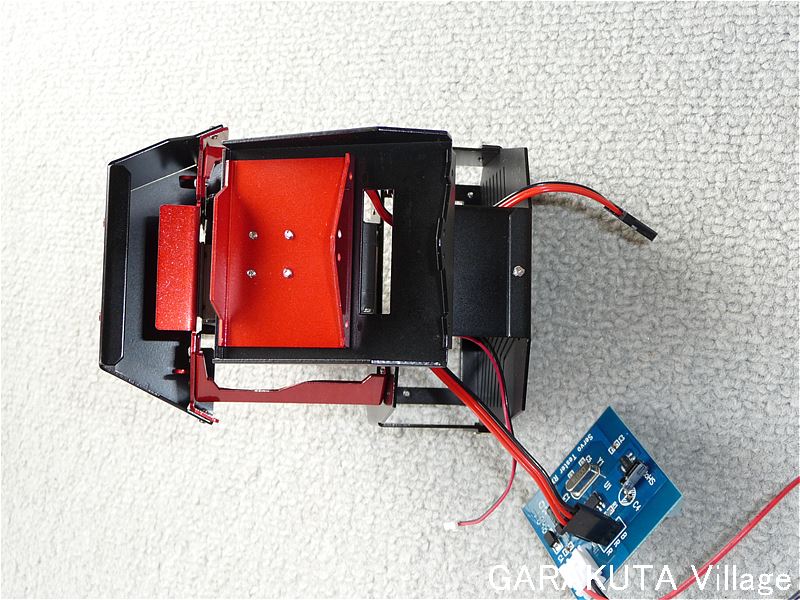
写真左は、サーボブラケットを時計の針の回転方向に回した時のものですが、サーボブラケットは90度まで回ります。
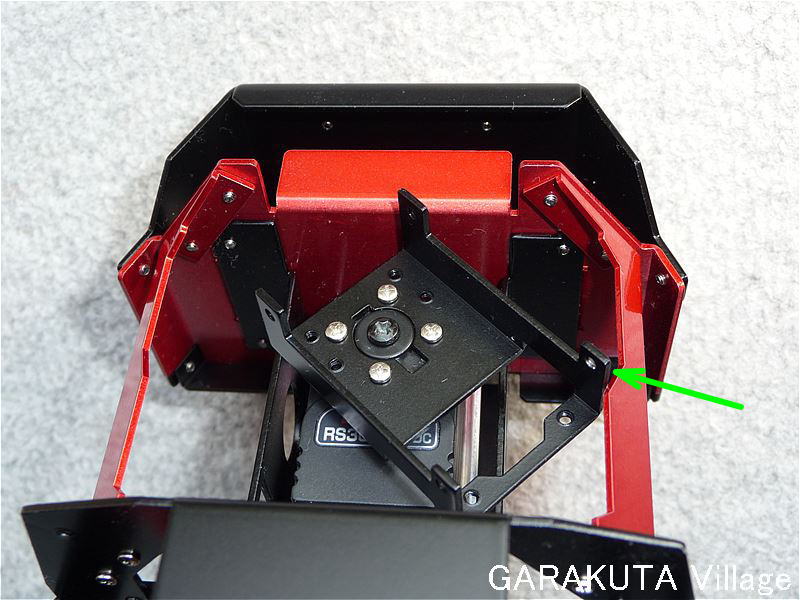
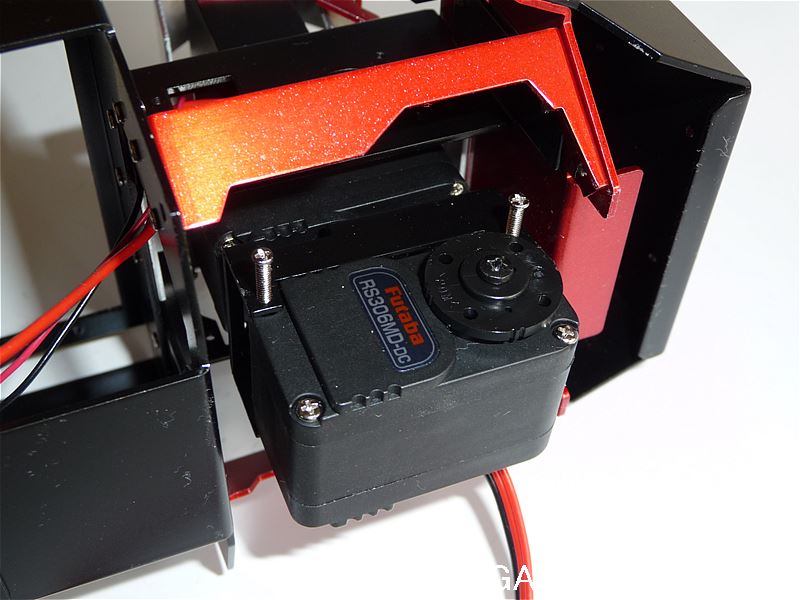
写真右は、サーボブラケットを時計の針の反対方向に回した時のものですが、サーボブラケットが第04号で取り付けたBの左ボディ補強フレームに当たってしまって(写真の中の青矢印部分)約45度以上は回りません。
どちらの動く範囲が正しいのかは判りませんが、第04号のAのボディ内部フレームの精度不良か、第04号のBの左ボディ補強フレームの寸法不良か、それとも、ボディ内部フレームを取り付ける、第02号のAバック・ボディフレームかBフロント・ボディフレームのネジ穴位置の精度不良かなあと思いますが、バラしての寸法チェックは現在の手持ちの工具類では至難の業ですから、このまま様子見することにします。
ある程度の数の量産品ですから、他の方も同様の状態と思いますので、デアゴスティーニ(DeAGOSTINI)社も気づいて、次号(第12号)には正常なパーツが付属してくるか、左ボディ補強フレームを修正するためのヤスリが付属してくるかを待つことにします。
この件については、皆さんの状況を知りたいと思って、DeAGOSTINI デアゴスティーニ・ジャパンの掲示板、週刊 ロボゼロ 男のロボット部掲示板へ、4月28日に質問を投稿依頼しました。
内容は、
—–
タイトル:サーボブラケットの動きの範囲
本 文:第11号の組立を終わり、取り付けたサーボブラケットの動きを確認してみました。もちろん手動です。
写真左は、サーボブラケットを時計の針の回転方向に回した時のものですが、サーボブラケットは90度まで回ります。
写真右は、サーボブラケットを時計の針の反対方向に回した時のものですが、サーボブラケットが第04号で取り付けたBの左ボディ補強フレームに当たってしまって(写真の中の青矢印部分)約45度以上は回りません。
どちらが正しいでしょうか?
週刊 ロボゼロ 男のロボット部掲示板への投稿については、検閲の後に掲載か否かが決まるとのことなので、パーツの不具合に関わりそうなことは掲載されないだろうと思って、4月28日に、同様の内容のことを、本サイトの掲示板、デアゴスティーニ(DeAGOSTINI)の週刊ロボゼロ ROBO XERO の組立情報交換へも投稿しておきました。
第11号の組立を終わった皆さんは、様子をお教え下さい。
4月28日の夜、週刊 ロボゼロ 男のロボット部掲示板からデアゴスティーニ掲示板 不採用理由通知メールなるものが届きました。
以下、一部引用
—–
>「男のロボット部掲示板」へ投稿いただきました以下の書き込みにつきまして、
>誠に申し訳ありませんが、掲載を見送りとさせていただきました。
>お客様のメールを担当部署に転送することも可能ではございますが、
>昨今は個人情報の取り扱いが大変厳しくなっておりますので、
>大変お手数とは存じますが、お客様ご自身で再度読者サービスセンターへの
>お問い合わせをお願い致します。
>読者サービスセンター
>電話:0570-008-109
>(営業時間:月~金10:00~18:00 ※土日祝日を除く)
—–
と書かれていました。
メールを担当部署へ転送してくれればよいのに・・・パーツの不具合めいた難しい内容には関わりたくないのが本音でしょうね。(何年か前の帆船模型 サン・ファン・バウチスタの時の掲示板管理者は非常に親切で、デアゴスアティーニの担当者から電話するように手配してくれて即決でしたが・・・)
5月2日に電話してみようと思っていますが、この不具合状況を「読者サービスセンター」に電話で説明して、内容が通じるのでしょうかねえ?
そういえば、第11号の組み立てガイドには、「取り付けたサーボブラケットの動きを確認すること」とは書かれていませんでしたので、この状態は、私の取り越し苦労かも知れません。
[続々] 第11号 結局は、左ボディ補強フレームをヤスリで修正しました
この不具合状況を「読者サービスセンター」に電話で説明しても、内容が通じるまでには長時間が掛かり、結局は通じなくて、電話代だけがかさんでムダになりそうなので、自分で修正することにしました。
4月30日
第11号で取り付けたサーボブラケットを取り外しました。
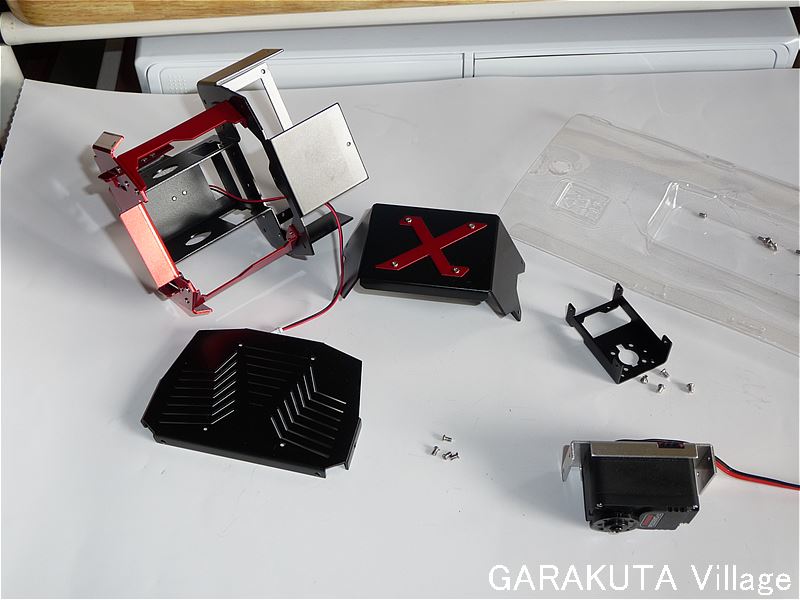
続いて第04号で取り付けたのAのボディ内部フレームを、サーボモータが付いたまま取り外しました。
ボディ内部フレームは、目視では異常は無いように見えますので、干渉する左ボディ補強フレームの反対側に押し付けて、再組立しました。
その後、サーボブラケットを組み付けて、手動で回してみました。
★結果は、
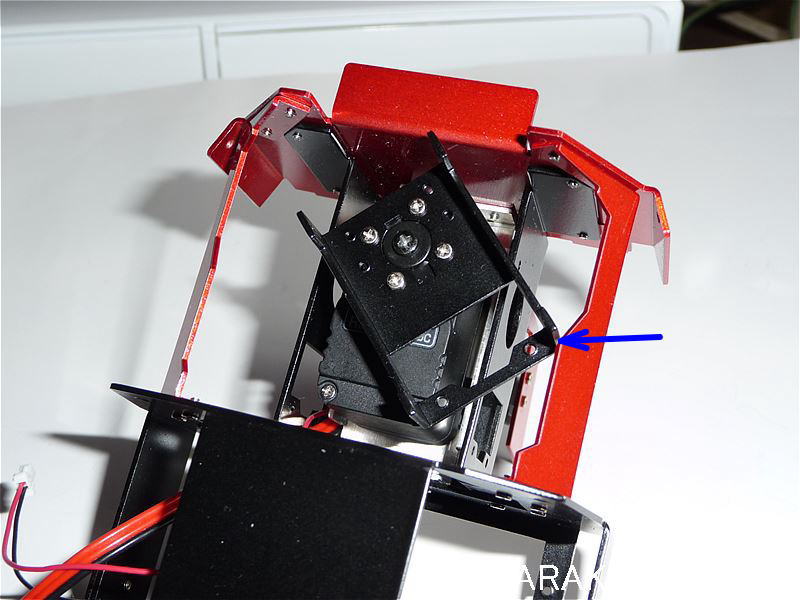
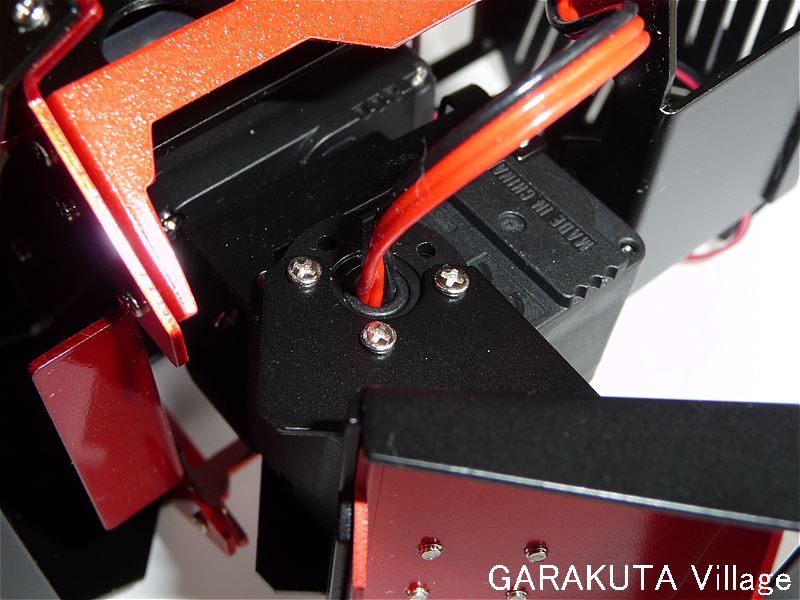
サーボブラケットと第04号で取り付けたBの左ボディ補強フレームの干渉度合いは軽減しましたが、まだ引っ掛かった動きをします。上の写真の青矢印の2ケ所。
ボディ内部フレームを取り付けるネジのバカ穴を大きくすれば干渉はなくなるでしょうが、こんどは左ボディ補強フレームと干渉して引っ掛かる可能性がありますので、次の手段を考えることにします。
5月1日
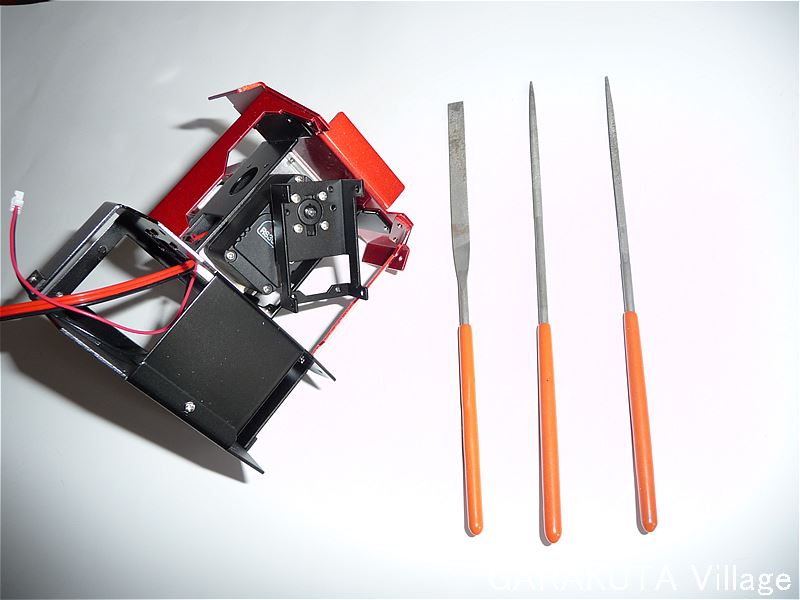
何年か前に一旦は腐った脳味噌で考えた結果、サーボブラケットの寸法、取り付けネジの位置、左ボディ補強フレームの寸法、取り付けネジの位置などの僅かな誤差の積み重ねが原因であろうと結論を出し、左ボディ補強フレームの干渉部分をヤスリで削ることにしました。
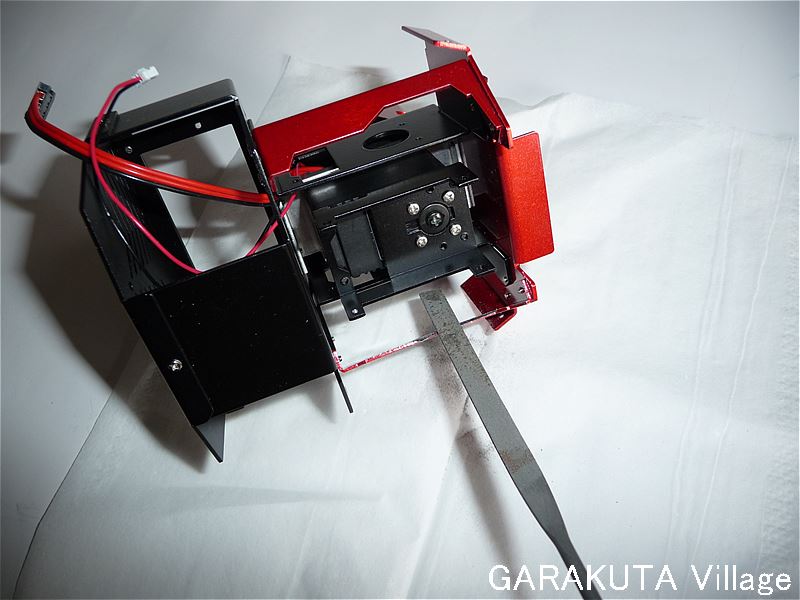
★削った結果は、
手動での動きはOKです。
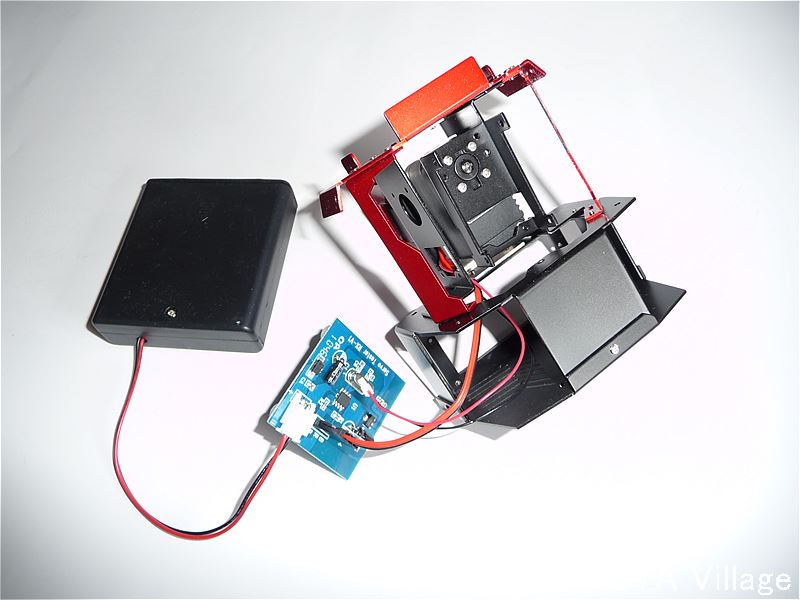
続いて、サーボモーターをテストボードに接続して、電動での動きをチェック。・・・OKです。
下に動画を挿入しておきます。動画の初めのほうで引っ掛かったような動きをしますが、サーボモーターの動きには異常はありません。ポンコツデジカメがギクシャクしてしまいました。
仕上げは、ヤスリで削った部分に、赤のマジックインキを塗っておきました。
下の動画で、初めのほうで引っ掛かったような動きをしますが、サーボモーターの動きには異常はありません。
ポンコツデジカメがギクシャクしてしまいました。
DeAGOSTINIの週刊ロボゼロ(ROBO XERO) サーボーモーターの動作テスト(4)
[続々々] 第11号 右ボディ補強フレームもヤスリで修正しておきました
5月3日
まだサーボブラケットを右へ左へと回しながら、左右のボディ補強フレームとのスキマを見たのですが、修正していない右ボディ補強フレームとの間が、ネジを締め直したら干渉しそうなので、干渉の予防として、右ボディ補強フレームもヤスリで削って修正しておきました。
[続々々々] 第11号 第12号の7ページの Point 欄をご覧下さい
5月4日に書店で第12号を受け取ってきました。
第12号の組立を始める前に、組み立てガイドに目を通しましたら、7ページの Point 欄に下記のように書かれていました。
「また、その上に取り付けられているサーボモーターによって、腰が左右に回転する。指で軽く動かしてみて、その動きを確認してみよう。」・・・ついでに、どこまで動けば正常なのかも書いて欲しかったです。
第12号 (2011/05/17号) 腰のフレームを胴体に取り付ける


サーボモーターを組み立てる
第09号 (2011/04/26号) の作業と同じため写真は省略。
12-1 サーボホーンを正しい位置に取り付ける
12-2 ネジを締めて固定する
サーボモーターの動作テストを行う
第06号 (2011/04/05号) の作業と同じため写真は省略。
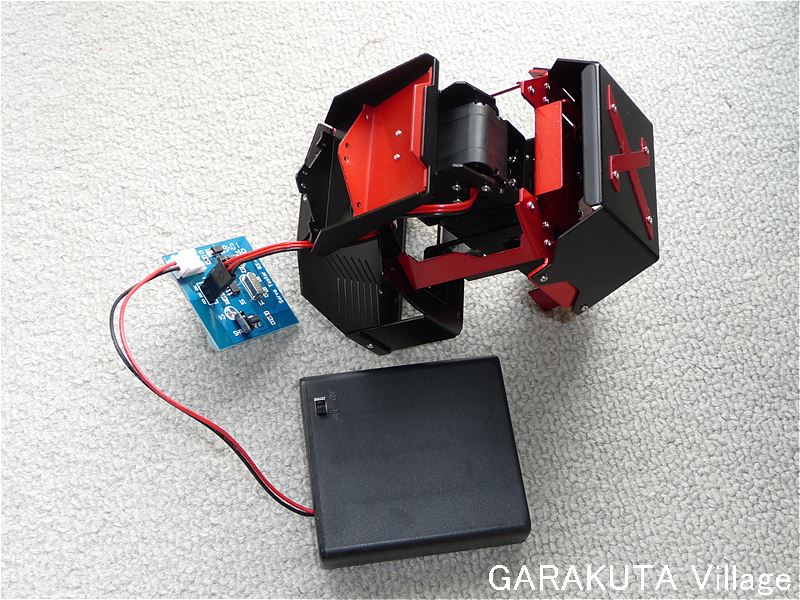
12-3 バッテリーボックスとテストボードをつなぐ
12-4 ステトボードとサーボモーターをつなぐ
12-5 電源を入れ、動きを確認する
サーボモーターを胴体内部に取り付ける
12-6 左側のネジ2本を抜き取る

12-7 サーボモーターをサーボブラケットに正しく付ける
12-8 ネジをしっかりと締める
腰のフレームを取り付ける
12-9 腰のフレームを正しい位置に取り付ける
12-10 サーボホーンをネジで固定する
12-11 フリーホーンをネジで固定する
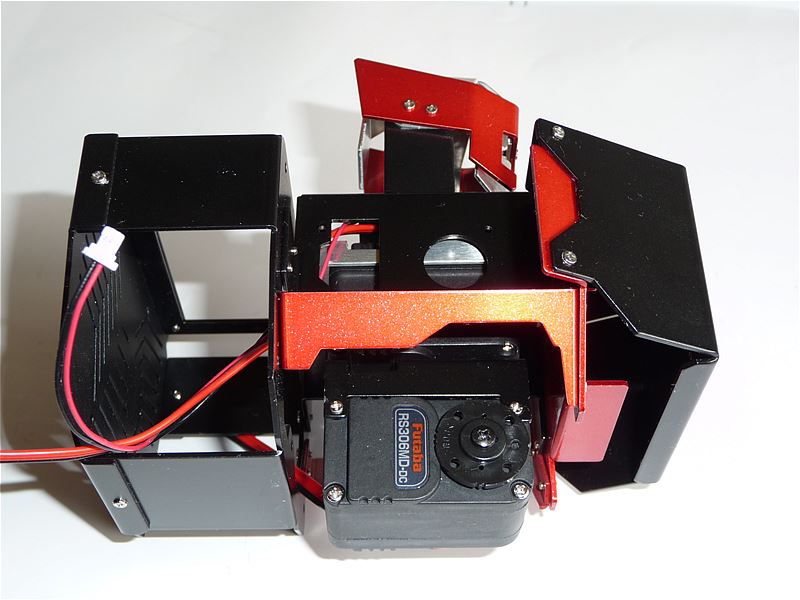
12-12 正しく取り付けられたか確認・・・写真はありませんが、組み立て間違いはありません。
動作テスト中
組立が完了したところで、2つのサーボモーターの動作をテストしてみました。
DeAGOSTINIの週刊ロボゼロ(ROBO XERO) サーボーモーターの動作テスト(5)
サーボモーターの動きを何かに当てて無理矢理止めても、サーボモータは焼損しないことが動作テストで判りました。
サーボモーター単体では、原点から左右の片側へ約144度回転します。
左右のボディ補強フレームを修正した後ですが、サーボブラケットはボディ補強フレームがストッパーとなって、約90度しか回りませんが、サーボモータは焼損することなく、反対方向へ回ってくれます。
但し、焼損しないからといっても、干渉の有無の確認だけはしておくべきだと思います。
組立が進むと、バラすのに苦労することになります。
第12号の組立完了状態