組立要領はマガジンの組み立てガイドに詳しく書かれていますので、ここでは省略し、組み立て中に気づいたこと・他を書いておきます。なお、組み立てガイドに従って組み立てますので、組み付けた状態の写真を掲載しておきます。

第26号 (2011/08/23号) 右手の指を動かすサーボを取り付ける


サーボモーターを組み立てる
サーボモータの動作テスト後に、サーボホーンを取り外すため、この作業は省略。
26-1 サーボホーンを正しい位置に取り付ける
26-2 ネジを締めて固定する
サーボモーターの動作テストを行う
第06号 (2011/04/05号) の作業と同じため写真は省略。
但し、サーボホーンは取り付けない状態でテストを実施。
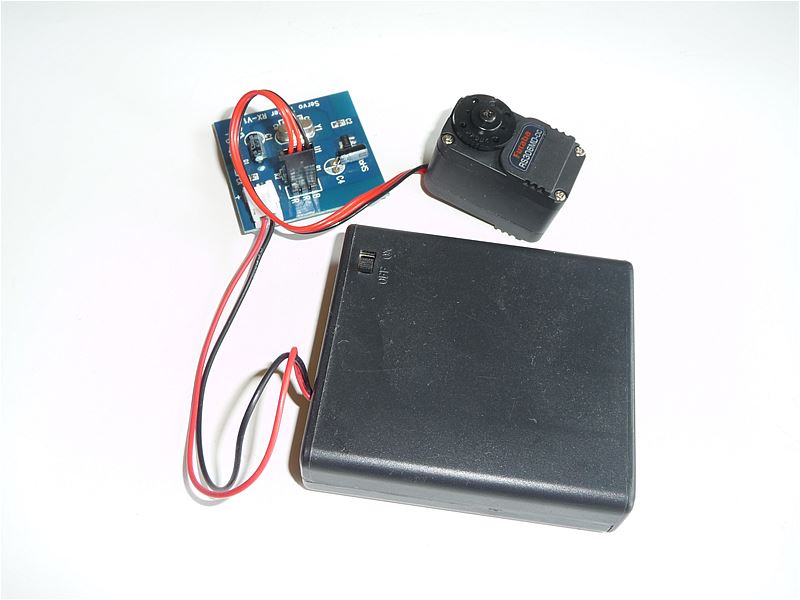
26-3 バッテリーボックスとテストボードをつなぐ
26-4 ステトボードとサーボモーターをつなぐ
26-5 電源を入れ、動きを確認する
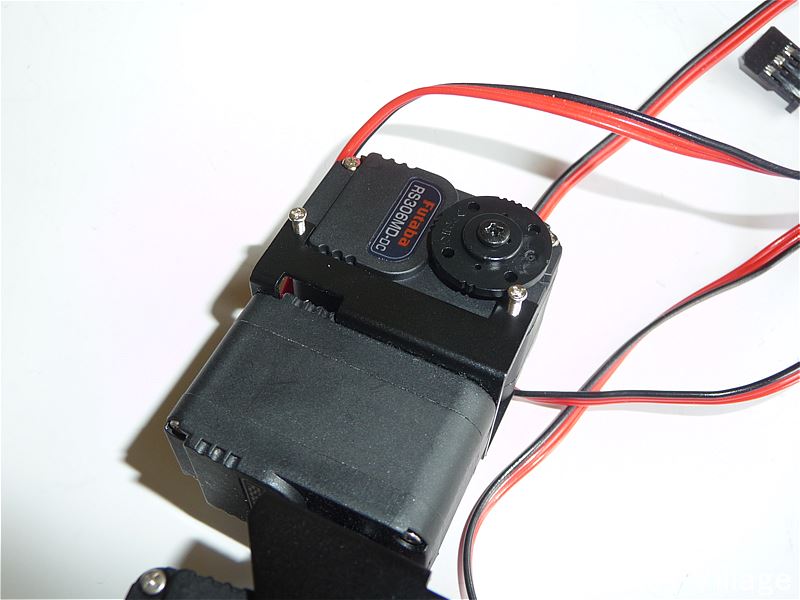
サーボモーターを右腕に取り付ける
26-6 サーボホーンを取り外す
サーボホーンは取り付けない状態でテストを実施したため、この作業は無し。
26-7 サーボモーターのケースのネジを外す

26-8 サーボモーターを右腕のフレームに正しく取り付ける

26-9 ネジでサーボモーターを固定する


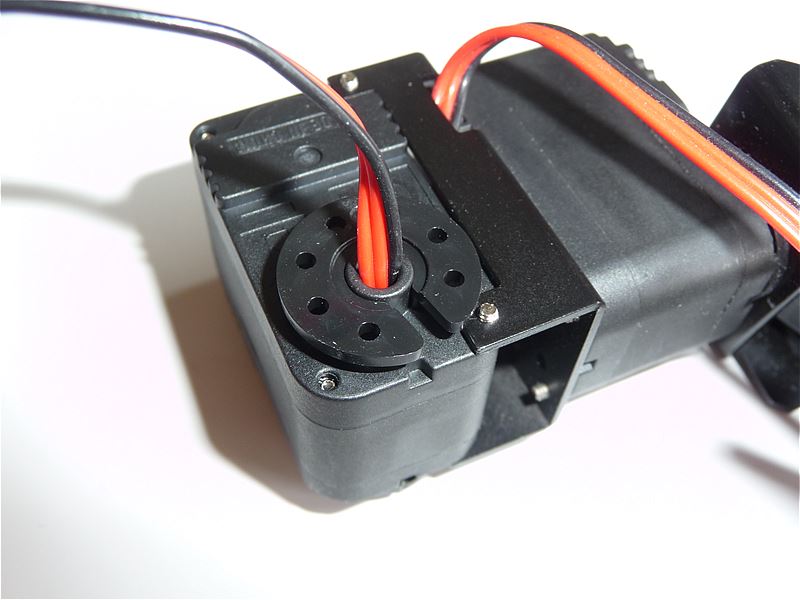
サーボモーターとリンクをつなぐ
26-10 サーボホーンにネジを差し込む

26-11 ネジにスペーサーをはめる

26-12 サーボホーンを取り付ける

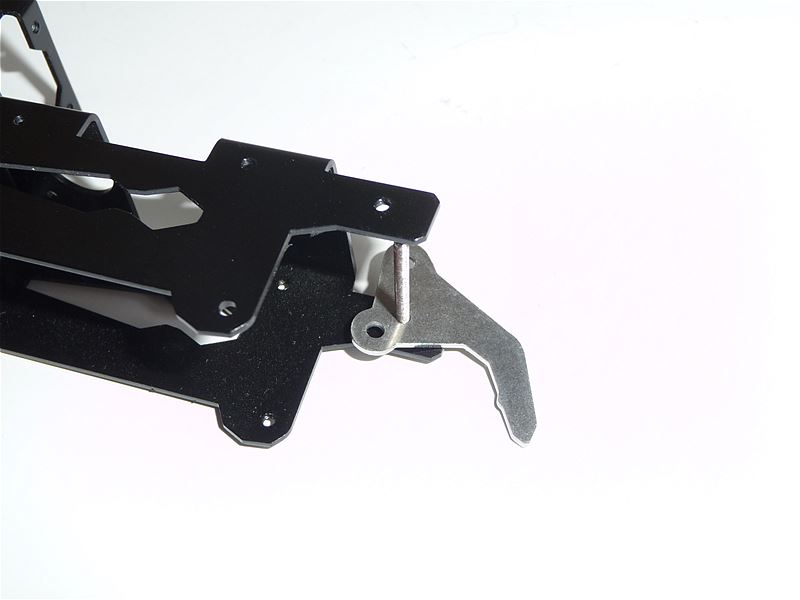
26-13 指リンクをサーボホーンにつなぐ

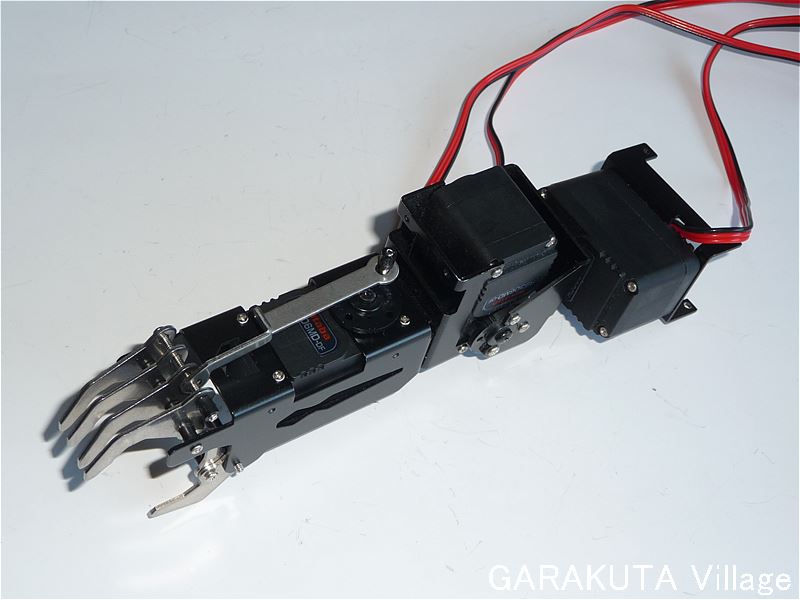
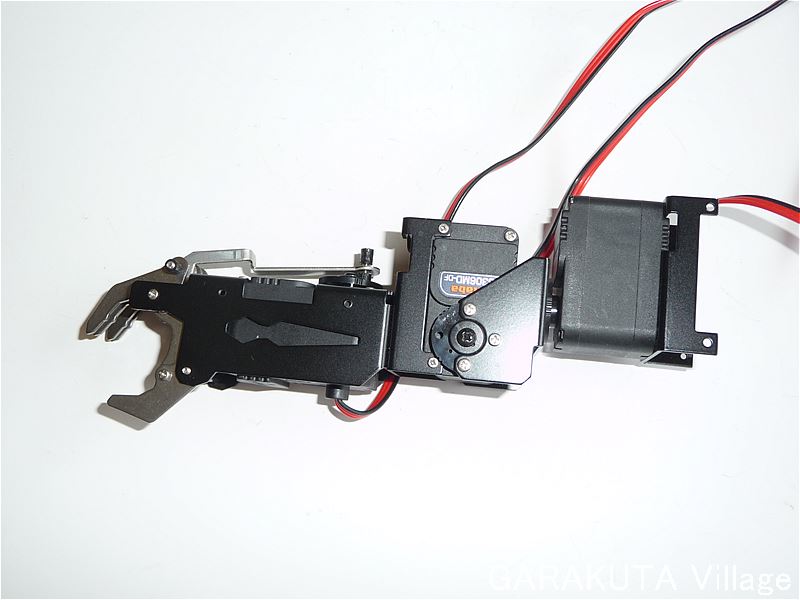
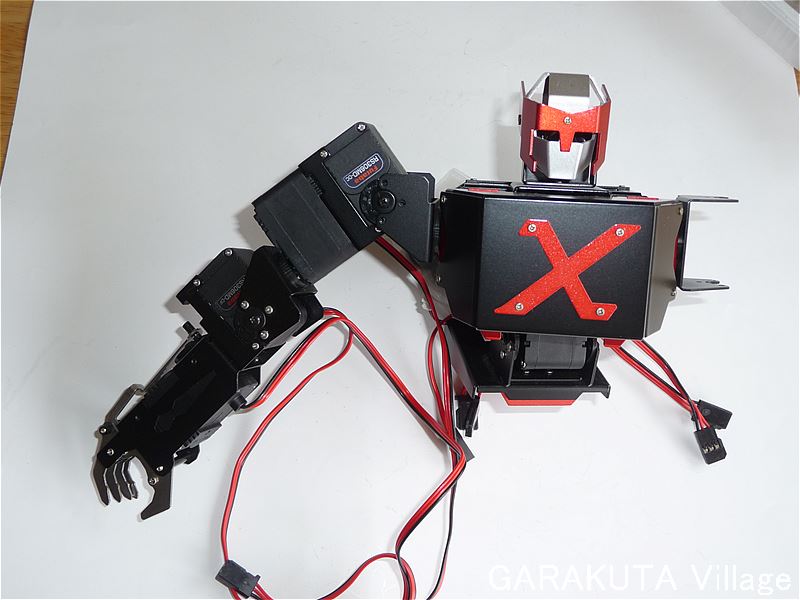
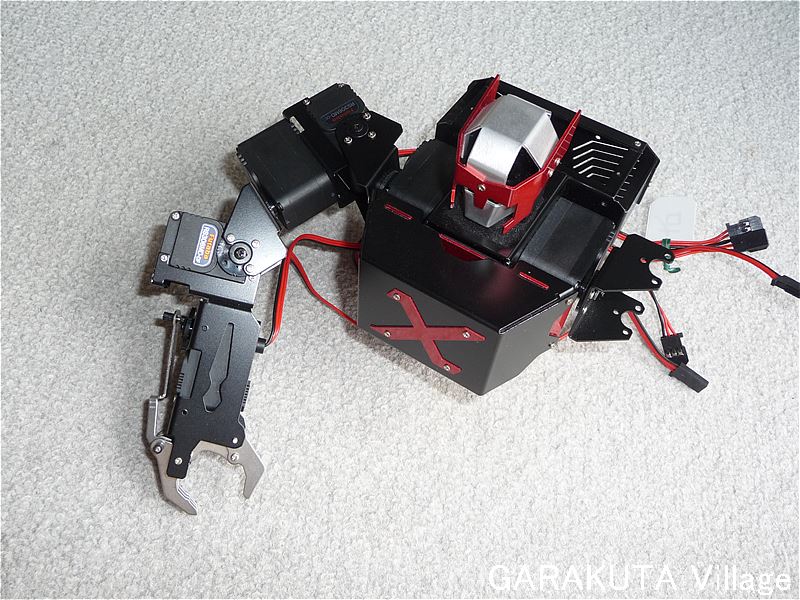
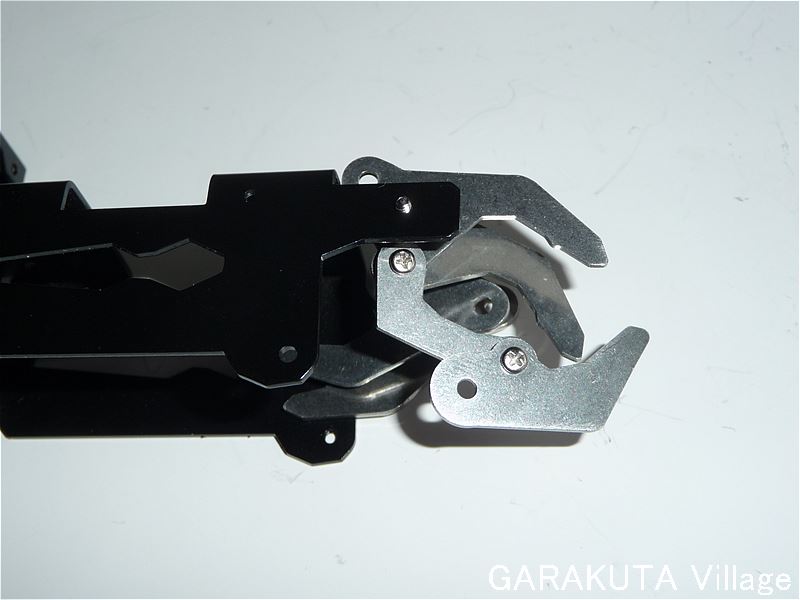
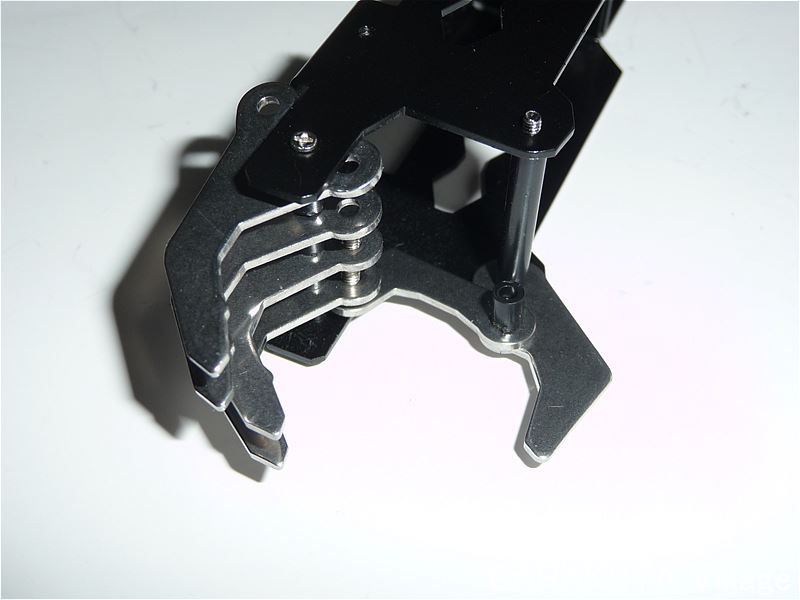
第26号の組立完了状態
動作テスト中
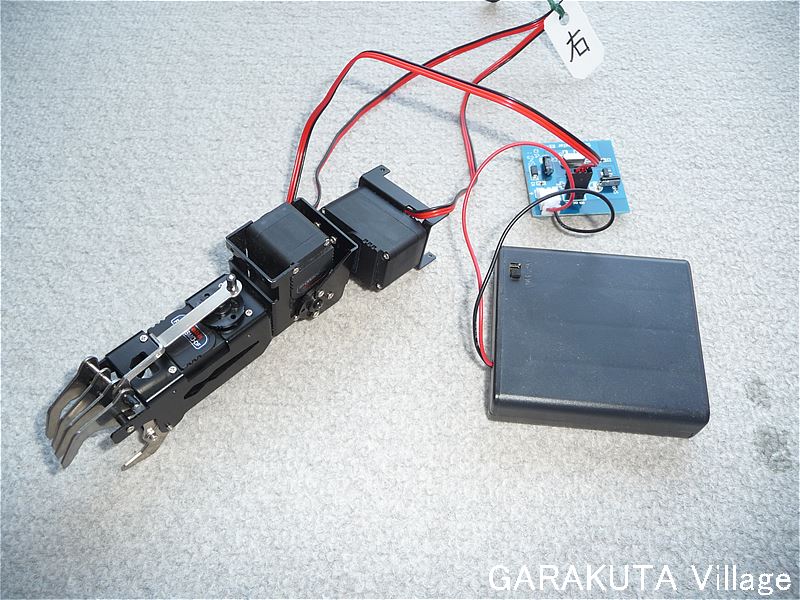 組み立てガイドの7ページには、「注意! テストボードにつながない」と書かれていますが、これに反して動作テストをしてみました。
組み立てガイドの7ページには、「注意! テストボードにつながない」と書かれていますが、これに反して動作テストをしてみました。
ついでに、自分の人差し指を掴ませてみました。痛いですよ。
DeAGOSTINIの週刊ロボゼロ(ROBO XERO) サーボーモーターの動作テスト(9)
第27号 (2011/08/30号) 左手の指4本を組み立てる


左手の指を組み立てる
27-1 左手の先にネジを差し込む

27-2 小指を正しい位置でネジに入れる
27-3 薬指にネジを通す
27-4 中指と人さし指をネジに通す

27-5 半円カットのスペーサーを正しい位置で入れる

27-6 ネジを固定する

第28号 (2011/09/06号) 右腕を肩に取り付ける


サーボモーターを組み立てる
第09号 (2011/04/26号) の作業と同じため写真は省略。
28-1 サーボホーンを正しい位置に取り付ける
28-2 ネジを締めて固定する

サーボモーターの動作テストを行う
第06号 (2011/04/05号) の作業と同じため写真は省略。
28-3 バッテリーボックスとテストボードをつなぐ
28-4 テストボードとサーボモーターをつなぐ
28-5 電源を入れ、動きを確認する
右腕を肩に取り付ける
28-6 組み立ての準備をする
28-7 サーボモーターのネジを抜く

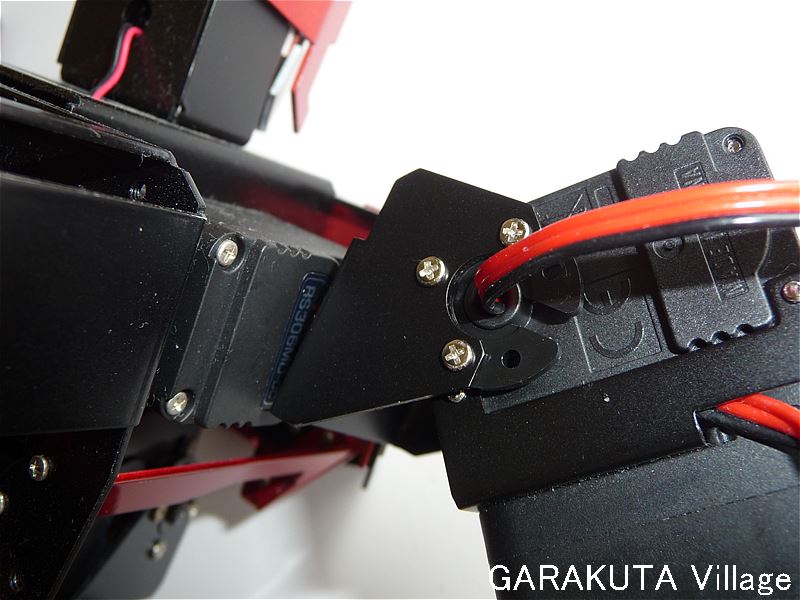
28-8 右腕にサーボモーターを正しい位置で取り付ける
28-9 サーボモーターをフレームにネジで固定する
28-10 フリーホーンを取り付ける
28-11 サーボモーターを右肩に正しく取り付ける
28-12 サーボホーンをネジで固定する

28-13 フリーホーンをネジで固定する
第28号の組立完了状態

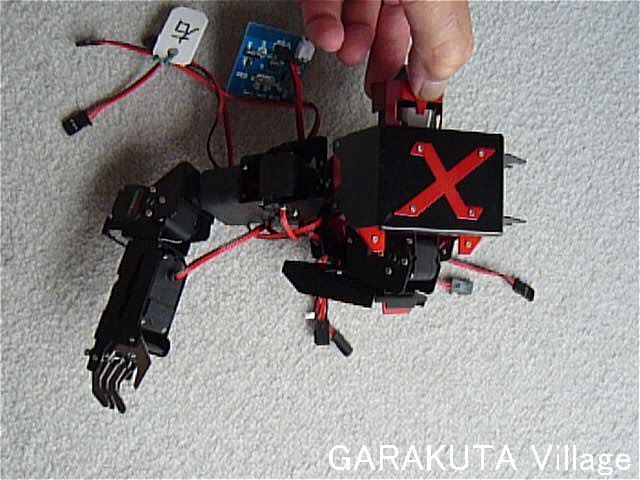
動作テスト中
右腕を肩に取り付けた上体でテストしてみました。
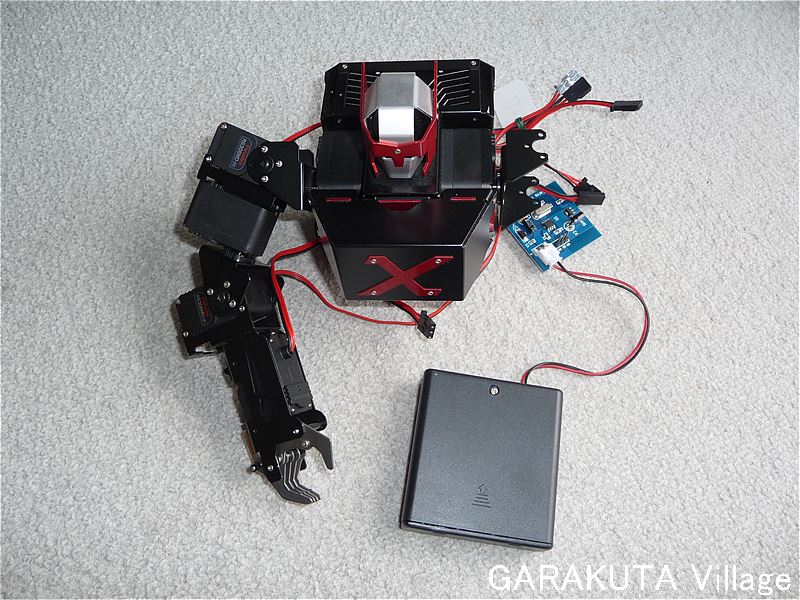
非常に荒っぽいテストをしましたので、同じようなテストはしないほうが良いですよ。 どうしてもやってみたい方は、壊れることを覚悟の上で、自己責任で行って下さい。
DeAGOSTINIの週刊ロボゼロ(ROBO XERO) サーボーモーターの動作テスト(10)
動作テストを終わりました
無事にテストを終わりました。
スタンドに載せてみました。

第29号 (2011/09/13号) 親指を左手に取り付ける


親指を組み立てる
29-1 親指にネジを差し込む

29-2 親指とリンクをつなぐ

29-3 親指リンクにネジを入れる

親指を左手に取り付ける
29-4 人さし指と中指にネジを入れる
29-5 親指をほかの2本の指とリンクさせる
第29号の組立完了状態

第30号 (2011/09/20号) ROBO XEROの記憶領域 microSDカード


今週は組立作業はありません。
第30号までの状態

お知らせ