組立要領はマガジンの組み立てガイドに詳しく書かれていますので、ここでは省略し、組み立て中に気づいたこと・他を書いておきます。なお、組み立てガイドに従って組み立てますので、組み付けた状態の写真を掲載しておきます。

第21号 (2011/07/19号) 右手の指4本を組み立てる


手を組み立てる
21-1 右手の先にネジを差し込む
21-2 スペーサーをネジに入れる

21-3 指を正しい位置でネジに入れる
21-4 残りの指をネジに通す

21-5 ネジを固定する

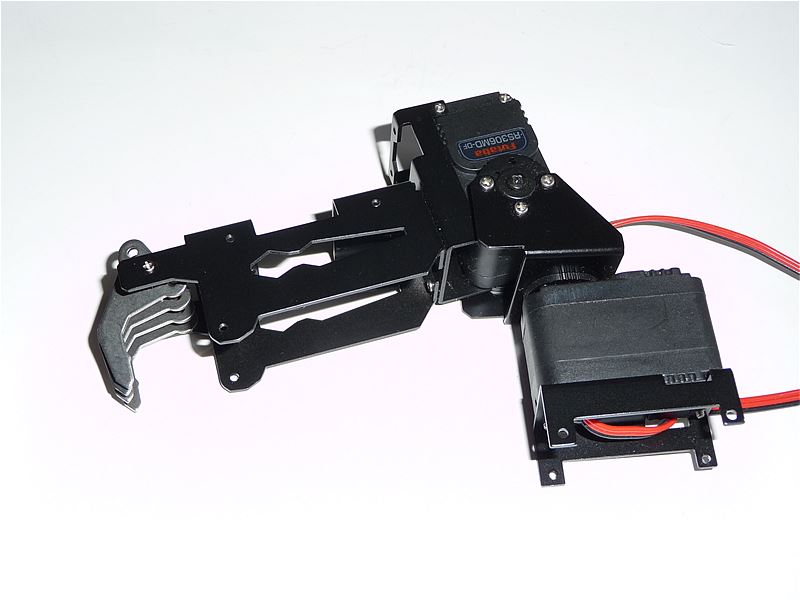
第21号の組立完了状態
第22号 (2011/07/26号) 左肩部分を組み立てる


作業は、第15号 (2011/06/07号) 右肩部分を組み立てる と、ほぼ同様です。
サーボモーターを組み立てる
第09号 (2011/04/26号) の作業と同じため写真は省略。
22-1 サーボホーンを正しい位置に取り付ける
22-2 ネジを締めて固定する
サーボモーターの動作テストを行う
第06号 (2011/04/05号) の作業と同じため写真は省略。
22-3 バッテリーボックスとテストボードをつなぐ
22-4 ステトボードとサーボモーターをつなぐ
22-5 電源を入れ、動きを確認する
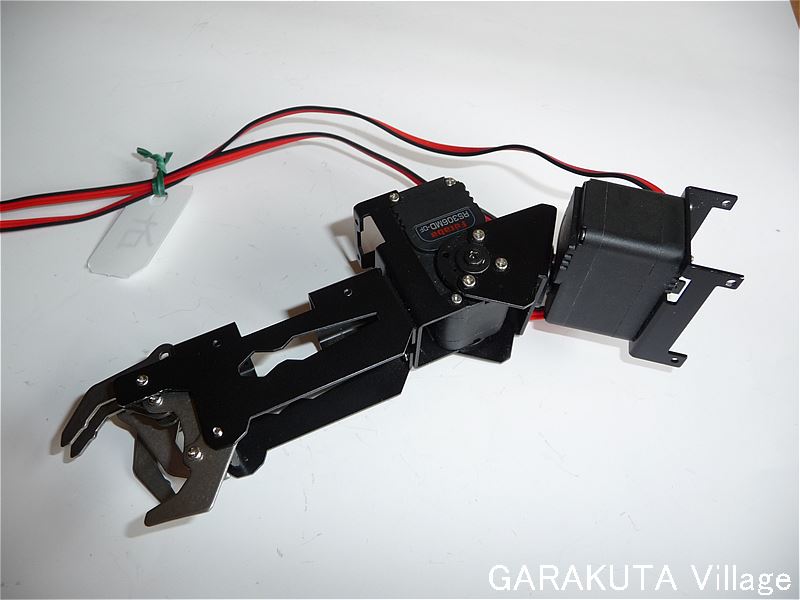
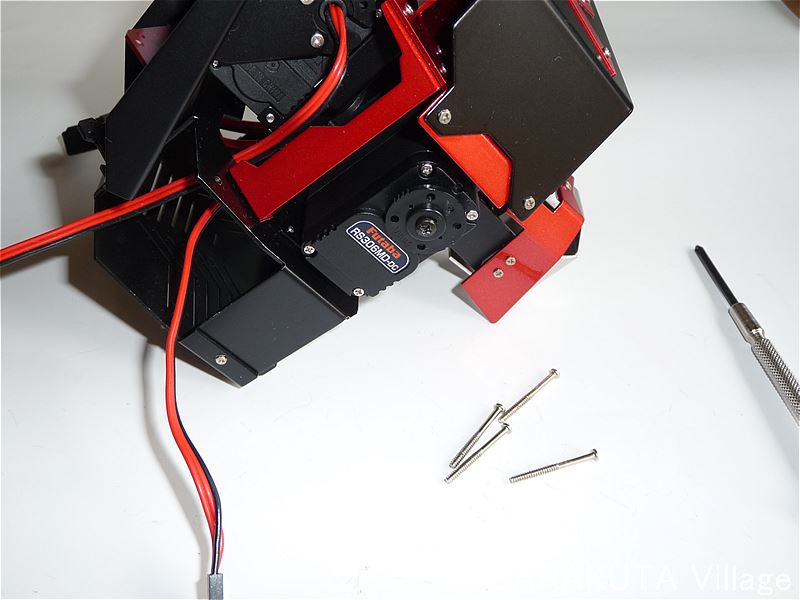
サーボモーターを右肩に取り付ける
22-6 ケーブルを穴に通す
22-7 サーボモーターを正しい位置に取り付ける
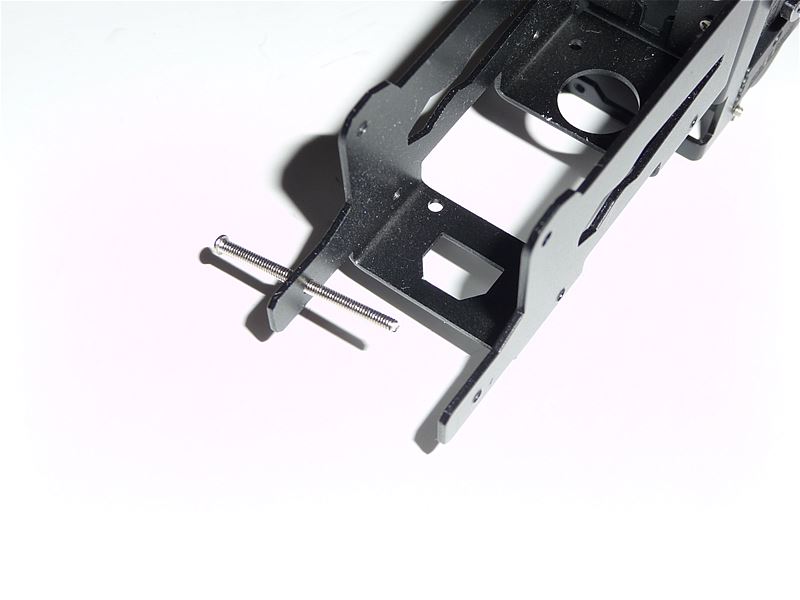
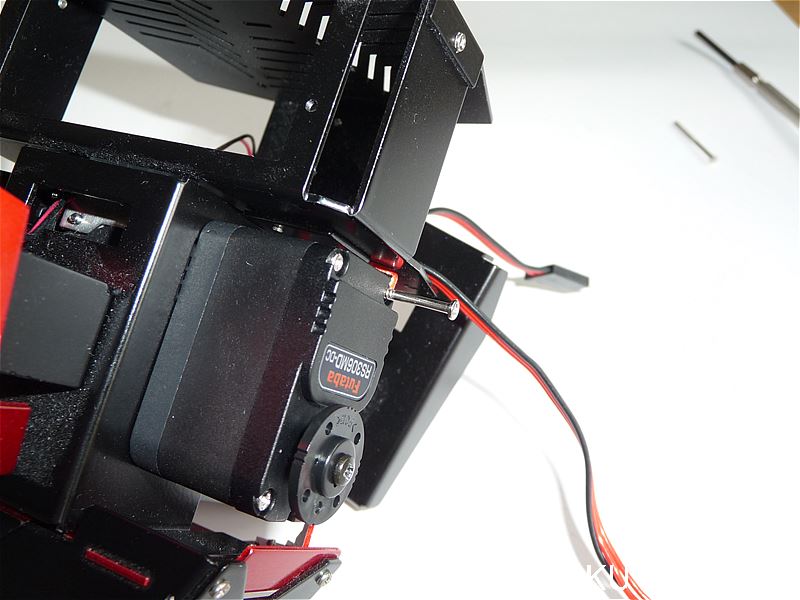
22-8 ネジを抜き取り、別のネジを差し込む①
22-9 ネジを抜き取り、別のネジを差し込む②
22-10 ネジを抜き取り、別のネジを差し込む③
22-11 ネジを抜き取り、別のネジを差し込む④
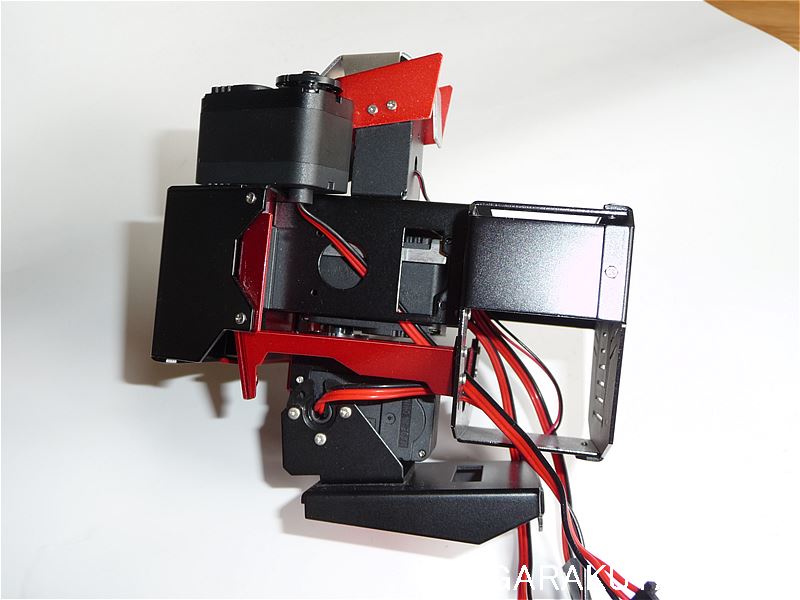
サーボモーターの取付完了
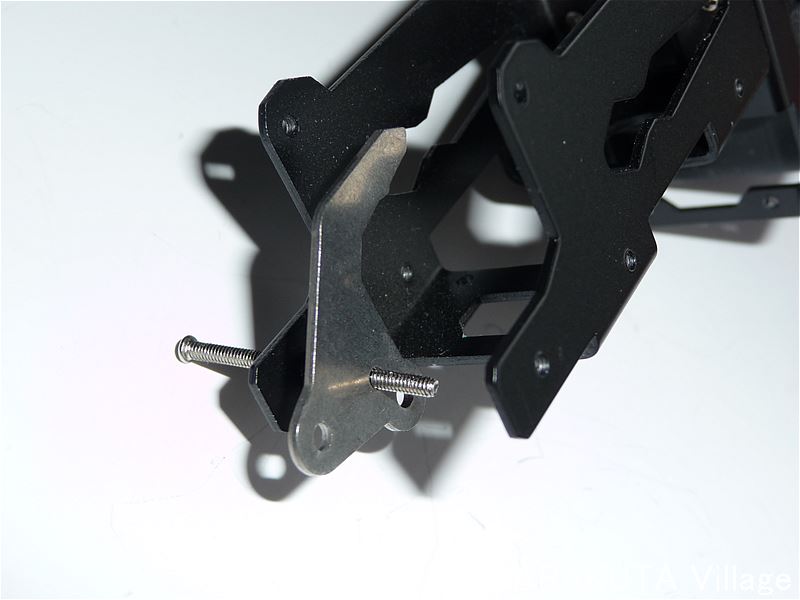
穴付きコの字ブラケットをサーボモーターに取り付ける
22-12 穴付きコの字ブラケットを正しい位置に取り付ける
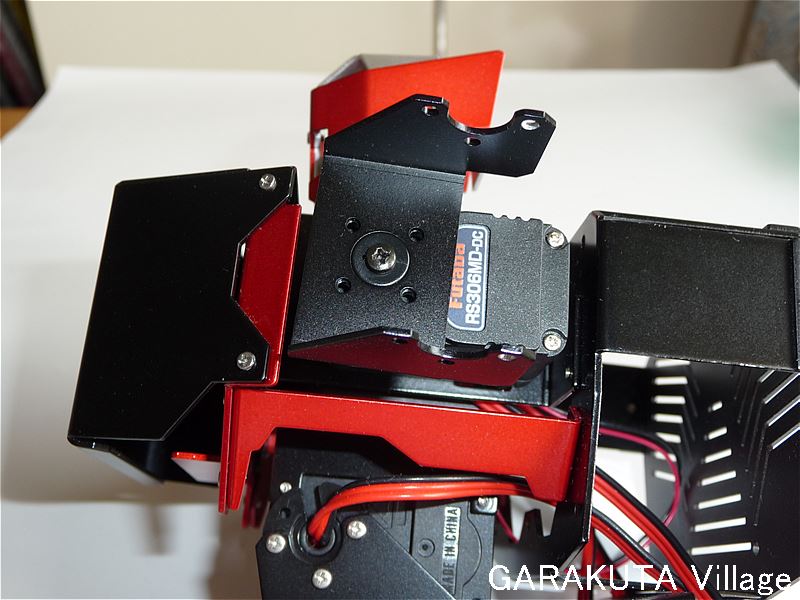
22-13 ネジでブラケットを固定する
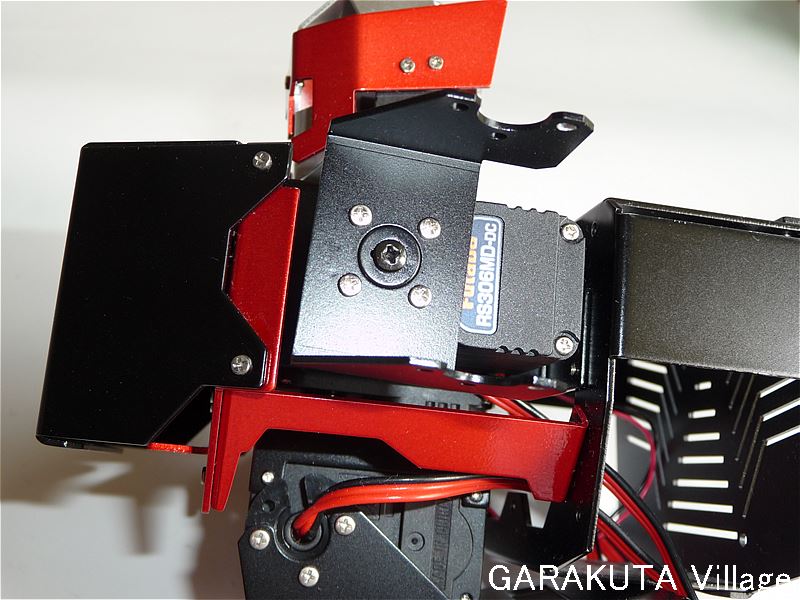
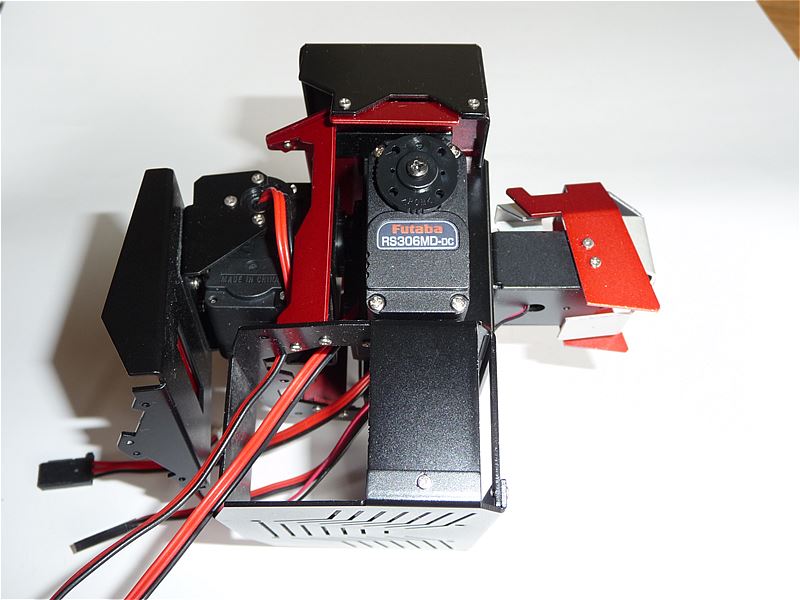
MADE IN CHINA と MADE IN TAIWAN
この第22号のサーボモーターを眺めていたら、裏側に「MADE IN TAIWAN」の文字。
全てが「MADE IN CHINA」だろうと思っていたのですが、2種類あったのですね。

動作テスト中
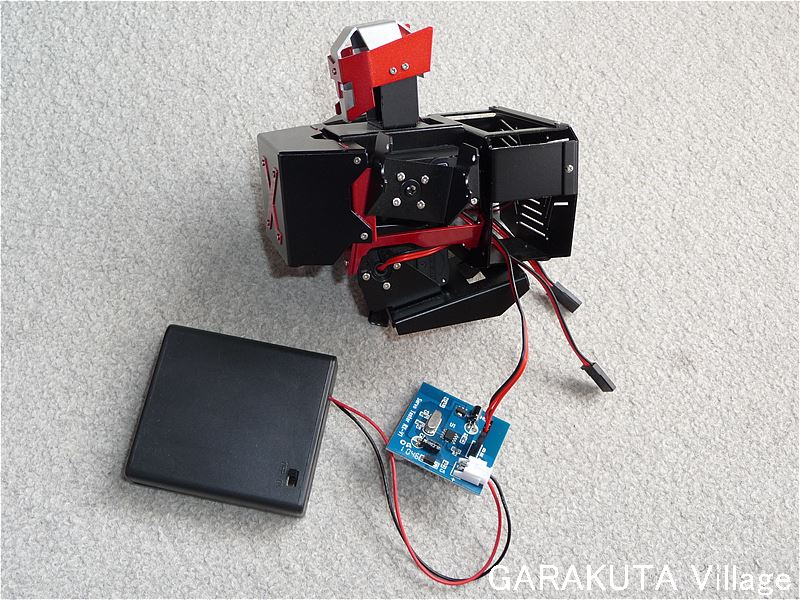
DeAGOSTINIの週刊ロボゼロ(ROBO XERO) サーボーモーターの動作テスト(8)
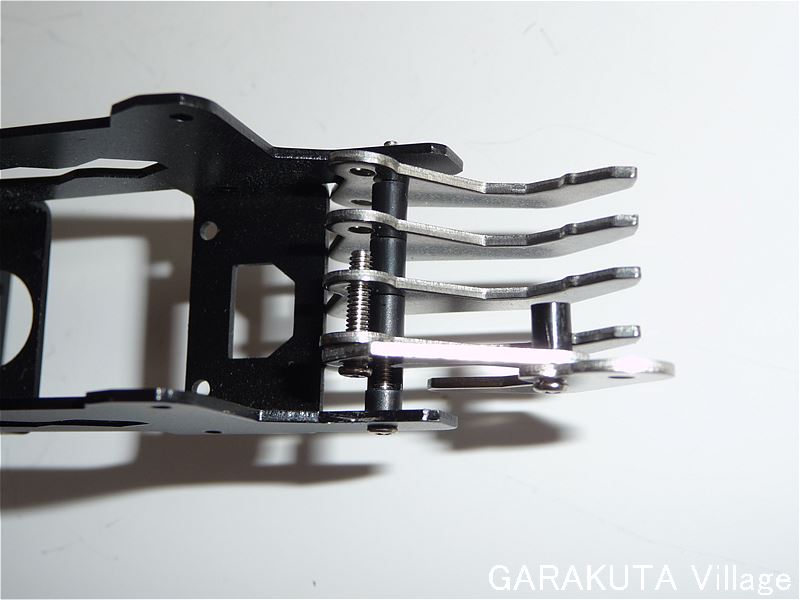
第23号 (2011/08/02号) 親指を右手に取り付ける

親指を組み立てる
23-1 親指にネジを差し込む

23-2 親指とリンクをつなぐ


23-3 指リンクにネジを入れる

親指を右手に取り付ける
23-4 人さし指と中指にネジを入れる
23-5 親指をほかの2本の指とリンクさせる

第23号の組立完了状態